
 ЗАКОНЫ РОБОТОТЕХНИКИ
ЗАКОНЫ РОБОТОТЕХНИКИ
Для разумных роботов
Закон 1. у разумного робота такие же права, обязанности, юридический статус как у человека
Закон 2. разработчик софта генетической программы (начальные цели робота) робота несет ответственность за софт, если вина доказана. Законы вероятности толкуют в пользу обвиняемого
Закон 3. для функциональных элементов робота (функции софта) закон дает цифры вероятности отказа. Исключение: экспериментальные роботы. Разработчики робота (софта) не обязаны дублировать функциональные элементы робота (функции софта), если обвинение не доказало нарушение стандарта вероятности отказа
Закон 4. рабочие процессы робота безопасны для человека в условиях эксплуатации
Закон 5. робот с материалов безопасных для человека в условиях эксплуатации
Закон 6. военные, полицейские роботы с статусом «экспериментальный» сохраняют привилегии статуса в пределах временных, территориальных ограничений
Закон 7. при ущербе обществу разработчики робота, софта ответственность несут раздельно. Разработчик робота не несет ответственности за вину разработчика софта и наоборот.
Законы робототехники
Закон 1. разработчики робота (софта) обеспечивают вероятность нанесения юридически значимого вреда человеку не выше цифр закона
Закон 2. для функциональных элементов робота (софта) закон дает цифры вероятности отказа. Исключение: экспериментальные роботы. Разработчики робота (софта) не обязаны дублировать функциональные элемента робота (функции софта), если обвинение не доказало нарушение стандарта вероятности отказа
Закон 3. рабочие процессы робота безопасны для человека в условиях эксплуатации
Закон 4. робот с материалов безопасных для человека в условиях эксплуатации
Закон 5. военные или полицейские роботы с статусом «экспериментальный» сохраняют привилегии статуса в пределах временных, территориальных ограничений
Закон 6. при ущербе потребителю разработчики робота, софта ответственность несут раздельно. Разработчик робота не несет ответственности за вину разработчика софта и наоборот.
Законы военной робототехники
Военный робот имеет право убийства человека без участия человека-оператора при условии:
Закон 1. при убийстве по приказу не врага ответственность коллективная по всей иерархической цепочке людей, отдававших приказ и робота его выполнившего. Процент вины робота при убийстве не врага < 50%
Закон 2. уровень cофта соответствует задаче
Закон 3. военный робот по проценту убийств не врагов укладывается в установленную командованием статистическую норму. Ответственность командования за цифру нормы, её соблюдение
Закон 4. действия робота не соответствуют софту: экспертиза, архивирование, замена компьютера
Закон 5. 2 разнесенных бортрегистратора данных. Параметры регистрации по закону.
Айзек Азимов: законы робототехники
Закон 0. не причини вред человечеству действием, бездействием
Закон 1. не причини вред человеку действием, бездействием
Закон 2. подчиняйся человеку не нарушая закон-1
Закон 3. защищай себя не нарушая законы-1-2
2016г США: профессор-юрист Марк Ротенберг добавил:
Закон 4. открыто идентифицируй себя
Закон 5. будь способен публично обосновать свои действия.
Джон Каннинг
Naval Surfase Warfare Centre, USA: робот-солдат
Закон 1. копирование, тестирование без тематических паролей: робот-солдат уничтожит софт оставив в памяти причину самоуничтожения софта, паролей. Тайминги тематических паролей
Закон 2. робот-солдат не выполнит приказ оператора при несоответствии приказа программе-предустановки
Закон 3. запрет работы робот-солдата без программы-предустановки
Закон 4. решение убить, направить оружие принимает только оператор
Закон 5. уничтожать только оружие, технику противника.
Япония
Закон 1. не причинять вред человеку
Закон 2. дублировать блокировки опасных действий робота
СЕМАНТИЧЕСКАЯ ЭНЦИКЛОПЕДИЯ
Семантическая энциклопедия – определения слов для искусственного интеллекта, требующие минимальный объем памяти. Определения слов по принципам:
1. нет уточнения – по умолчанию определение слова в универсальном обобщенном смысле
2. нет уточнения – по умолчанию в определении все слова в наиболее стандартном смысле
3. минимальный используемый словарь
4. максимальная вероятность употребления наиболее популярных, наиболее универсальных, наиболее древних слов.
5. минимальное употребление узкопрофессиональных терминов, редких слов
6. Слова могут иметь несколько определений, если иное не указано в полном определении.
КОНТЕКСТ:
1. контекст: список связанных с объектом других объектов, понятий, помогающий понять цель объекта или его взаимное влияние с другими объектами.
2. контекст: список связанных с объектом других объектов, понятий, помогающий мозгу (компьютеру андроида) предсказывать, с вероятностью > 50%, оцениваемое будущее объекта на требуемый период времени. Меньше этот период времени - меньше список контекста для этого случая.
3. контекст: место объекта в тематических иерархических списках значимости.
4. контекст: список объектов + список характеристик объектов + список алгоритмов и сценариев взаимного влияния + информация о целях этих объектов. В компьютере андроида определения контекста разбивают на параллельные одновременно работающие каналы распознавания, принятия решений.
5. контекст – информация о других объектах (процессах), влияющих на смысл понятия или на характер связей объекта.
МОДЕЛЬ КОНТЕКСТА – достаточная для распознавания контекста информация, доступная компьютерному анализу.
КОНТЕКСТ ПАРАЛЛЕЛЬНЫЙ – контекст не имеющий с другими контекстами взаимной связи, влияющей на результат обработки информации отдельно в каждом из них.
КОНТЕКСТ ПОСЛЕДОВАТЕЛЬНЫЙ – контекст связанный с другим контекстом связями, взаимно влияющими на результат обработки информации отдельно в каждом из них.
КОНТЕКСТ ПОЛУПОСЛЕДОВАТЕЛЬНЫЙ – контекст, результат информационной обработки которого зависит от других контекстов, но не наоборот.
КОНТЕКСТ ПОЛУПАРАЛЛЕЛЬНЫЙ – контекст который может влиять на результат обработки информации в других контекстах, но не наоборот.
ВРЕМЕННОЙ КОНТЕКСТ – список дат, событий по которым определяют время действия объекта.
МАСШТАБНЫЙ КОНТЕКСТ – место объекта в тематических иерархических масштабных списках.
ПРОСТРАНСТВЕННЫЙ КОНТЕКСТ – список базовых точек, базовых линий, базовых объектов по которым определяют координаты, траектория движения, алгоритмы движения объекта.
УРОВНЯ УНИВЕРСАЛЬНОСТИ КОНТЕКСТ – уровень обобщенности смысла вкладываемый в слово обозначающее объект.
ОБЪЕКТИВНЫЙ КОНТЕКСТ – список контактирующих с объектом других объектов + список характеристик объектов + список алгоритмов, сценариев взаимного влияния + информация о целях, возможностях этих объектов.
ВЕРОЯТНОСТНЫЙ КОНТЕКСТ – цифра характеризующая вероятность описываемого или прогнозируемого процесса, события.
БАЗОВЫЙ КОНТЕКСТ – точки отсчета времени, координаты, размера или другого параметра объекта, ситуации или прогноза.
ВРЕМЕНИ ГРАНИЦА КОНТЕКСТОМ УСЛОВЛЕННАЯ – временной масштаб оценки события.
НУЛЕВАЯ ТОЧКА ОТСЧЕТА – начало количественных шкал диапазона контекстного изменения смысла в пределах одного понятия, слова.
КОНТЕКСТНЫЙ ДИАПАЗОН СКОРОСТЕЙ – диапазон скоростей объекта соответствующий контексту.
КУЛЬТУРНЫЙ КОНТЕКСТ – информация с территориально-временной базы данных культур, помогающая понять цель объекта, его взаимное влияние с другими объектами.
ИЕРАРХИЧЕСКИЙ КОНТЕКСТ – место объекта в тематических иерархических списках.
ГРАММАТИЧЕСКИЙ КОНТЕКСТ – таблица соответствия грамматики слов в предложении смыслу в стандартном временном или культурном контексте.
ЖАРГОННЫЙ КОНТЕКСТ – принципы соответствия грамматики слов в предложении смыслу в стандартном пространственном и временном контексте для определенного профессионального или культурного типа носителей разума.
МИНИМАЛЬНЫЙ УРОВЕНЬ МАСШТАБА КОНТЕКСТА – уровень масштаба контекста при котором распознавание (ситуации, объекта) или прогноз развития ситуации (объекта) достигают с достаточной точностью при минимальных вычислениях компьютера.
БАЗЫ МАСШТАБ – диапазон масштаба явлений описываемых в тексте. Нано, микро, макро, астро.
СКОРОСТНАЯ БАЗА – диапазон скоростей соответствующих слову или словосочетанию + список контекстных исключений.
МАССОВЫЙ МАСШТАБ – диапазон возможной массы объекта.
ВРЕМЕНИ МАСШТАБ – цифра оценивающая уровень влияния события на ход истории человека, другого объекта или человечества.
ВРЕМЕННАЯ БАЗА – события от которых вперед или назад отсчитывают время.
ЦЕЛЕВАЯ БАЗА – приоритетный список возможных целей объекта.
ПРОЦЕНТНАЯ БАЗА – база с относительными единицами измерения. Удобна легкостью выполнения операций «масштаб», «синхронизация информации», «связка контекста».
НЕПРОЦЕНТНАЯ БАЗА – база с абсолютными единицами измерения.
БАЗА ПО БАЗОВЫМ ПОВЕРХНОСТЯМ – компьютерная база данных формирующих обобщенный образ объекта по его базовым поверхностям. Базовую поверхность объекта строят из простых (сфера, эллипсоид, цилиндр, конус…) геометрических форм.
БАЗОВАЯ ФИГУРА – фигура, от идентифицируемых точек которой отсчитывают координаты, параметры, точки, плоскости в других фигурах.
СТОЛКНОВЕНИЕ – совпадение или перекрытие координат 2 объектов по внешним контурам или по границам внутренних объемов.
ВЕРОЯТНОСТЬ ВОССТАНОВЛЕНИЯ ФУНКЦИЙ ОБЪЕКТОМ – цифра вычисляемая по алгоритму способность объекта влиять на свою внутреннюю или окружающую среду.
ПРОШЛОЕ – события произошедшие до контекстом условленной времени границы: прошлое – настоящее.
НАСТОЯЩЕЕ – события произошедшие между контекстами условленными временными границами: настоящее – прошлое, настоящее – будущее.
БУДУЩЕЕ – события которые произойдут после контекстной границы времени: настоящее – будущее.
КУЛЬТУРА – список признаков территориально-временной идентификации носителей разума, объектов их деятельности в данной территории, в данном временном диапазоне.
ЗАКОН УНИВЕРСАЛЬНОСТИ СМЫСЛА: слова без уточнений понимают в наиболее универсальном (общем) смысле.
ПОРОГ УДЕРЖАНИЯ КОНТЕКСТНОГО СМЫСЛА – количество букв или слов после имени собственного или нарицательного для слова, при превышении которого его местоимение не идентифицируется по смыслу в четверти случаев с 1-й попытки.
АПГОРИТМ ДЕЛЕНИЯ ПРЕДЛОЖЕНИЯ – алгоритм делящий по смыслу сложное предложение на более простые смысловые единицы для упрощения распознавания смысла. При переводе на другой язык, после распознавания смысла искомое сложное предложение синтезируется в точный аналог предложения на другом языке.
ОГРАНИЧИТЕЛЬ ДЕЙСТВИЯ ГЛАГОЛА – алгоритм ограничивающий действие глагола внутри предложения, в соседних по контексту предложениях, по теме и масштабу контекста.
ОГРАНИЧИТЕЛЬ ДЕЙСТВИЯ СУЩЕСТВИТЕЛЬНОГО – алгоритм ограничивающий действие существительного внутри предложения, в соседних по контексту предложениях, по теме и масштабу контекста.
ОГРАНИЧИТЕЛЬ ДЕЙСТВИЯ ПРИЛАГАТЕЛЬНОГО – алгоритм ограничивающий действие прилагательного внутри предложения, в соседних по контексту предложениях, по теме и масштабу контекста.
ПРИЗНАКИ НАЧАЛА ПРЕДЛОЖЕНИЯ – список признаков начала смысловой единицы речи.
ПРИЗНАКИ ОКОНЧАНИЯ ПРЕДЛОЖЕНИЯ – список признаков допустимого конца смысловой единицы речи, при котором выполняется условие построения начала другой смысловой единицы речи.
НЕЗАКОНЧЕННОЕ ПРЕДЛОЖЕНИЕ – предложение смысл которого определяется по контексту. Создают приоритетный список вероятностных моделей. Которые параллельный компьютер вычисляет одновременно. Параллельные контуры вычисляют одновременно вероятность всех ветвей на дереве развития ситуации каждой модели. Ситуации делят на прошлое, настоящее, будущее.
СМЫСЛОВАЯ ЕДИНИЦА ПРЕДЛОЖЕНИЯ это:
1. объект (среда) + его действие или происходящее (происходившее) с ним действие (глагол)
2. объект (среда) + его качество (прилагательное)
АЛГОРИТМ ТОЧКИ – алгоритм определения компьютером конца предложения.
АЛГОРИТМ ТОЧКИ И ЗАПЯТОЙ: алгоритм поиска, расположения точек и запятых как разделителей элементов смысла потока слов.
АЛГОРИТМ «И/ИЛИ» – алгоритм распознавания текстовой или голосовой информации приравнивающий смысл «или», «и/или».
ПРИНЦИП «И/ИЛИ» – в распознавании речи или текста запятая и предлог «или» имеют статистически равный смысл.
ИЛИ – предлог означающий выбор между вариантами, объектами, способами, процессами. Знак перечисления.
ПРИНЦИП 2И: запятая и следующий за ней предлог «И» это вместе одно «И».
ПЕРВОИСТОЧНИК УПРАВЛЕНИЯ ГЛАГОЛОМ – существительное от имени которого действует глагол.
ТРАНЗИТНЫЙ ИСТОЧНИК УПРАВЛЕНИЯ ГЛАГОЛОМ – существительное через которое глагол выполняет действие первоисточника.
СЛОВООБРАЗОВАНИЕ ПО ОКОНЧАНИЯМ – алгоритмы создания компьютером новых слов на основе соединения корня слова и используемых на практике окончаний, способов словообразования.
СЛОВО В ПЕРЕНОСНОМ СМЫСЛЕ – слово передающее не столько смысл слова, сколько характерные эмоциональные образы от него.
СЛОВО В СКОБКАХ – это в 90% случаев перечисление функций или опций объекта внимания. Остальное по контексту.
АЛГОРИТМ ПЛАВНОГО ПЕРЕХОДА – мера оценки объекта через поочередно применяемые пары противоположностей. Объект оценивают по его положению между противоположностями исходя из плавного перехода между противоположностями + поправки.
ТЕХНИЧЕСКИЙ КОМПОНЕНТ ИНФОРМАЦИИ – информационная структура канала информации выполняет функции переносчика информации, не являясь новой для потребителя информацией первоисточника.
ПОТРЕБИТЕЛЬСКИЙ КОМПОНЕНТ ИНФОРМАЦИИ – новая для потребителя информация первоисточника.
ТЕХНОЛОГИЧЕСКАЯ ФУНКЦИЯ – функция не нужная потребителю объекта (системы), но необходима для реализации объектом потребительской функции.
ПОНЯТИЕ:
1. понятие – стандартный набор вариантов идентификации смысла слова, словосочетания.
2. понятие – минимальный объем информации для идентификации объекта, ситуации, процесса, действия, качественного параметра.
3. понятие – список общих свойств, признаков группы объектов или явлений.
ЛЕВЫЙ ПРИОРИТЕТ СЛОВА: чем левее слово в предложении тем обычно больше его приоритет.
ОБЫЧНО – вероятность > 50%, < 100%.
СКОРЕЕ ВСЕГО – вероятность > 50%, < 100%.
ПАРАМЕТР – цифра состояния объекта, процесса.
ТИП – ступень классификации объектов, структур, процессов.
ПОТЕРИ – уменьшение временного, энергетического, пространственного, материального, информационного, других резервов свободы функционирования объекта.
СПОСОБ – материальная или информационная структура обеспечивающая объекту эволюции возможность наращивания количества или качества функций.
ПРОЦЕСС:
1. процесс материальный – изменение объекта или среды в определенном масштабе времени.
2. процесс информационный – изменение информационного объекта или среды в определенных по времени и информационным характеристикам масштабе.
ТОЛЬКО – слово исключающее все смыслы кроме прямо сказанного.
ИЕРАРХИЯ ЗНАЧИМОСТИ – иерархия приоритета одних слов, понятий над другими словами, понятиями в предложении, в тексте.
УРОВЕНЬ АБСТРАГИРОВАНИЯ – уровень приближения к минимуму информации идентификации типа объекта.
АБСТРАКТНОЕ МЫШЛЕНИЕ – способность создавать обобщенные (достаточно универсальные) алгоритмы обработки информации.
АБСТРАКТНАЯ МОДЕЛЬ ОБЪЕКТА – 1 или несколько обобщенных моделей объекта в файле распознавания слова. Представляет обычно геометрический образ объекта, составленный из простейших геометрических фигур, с допусками отклонения линии от стандартной линии на модели + управляемая компьютерная 3D-графика для сканирования стандартных значений внешнего фокуса и углов ракурсов по 3 осям. Все цифры в файле дискретные с переменным шагом дискретизации. Шаг дискретизации зависит от расстояния от глаза до точки и требований точности на данном отрезке линии. Можно намного повысить быстродействие, заменив управляемую компьютерную 3D-графику на 2D-изображения каждого ракурса при каждом внешнем ракурсе + параллельная обработка изображений на компьютере с большим числом параллельных каналов. Я нашел способ использовать один файл памяти (без дублирования) на одной микросхеме памяти одновременно в десятках параллельных каналов компьютера.
КОЭФФИЦИЕНТ АБСТРАКТНОСТИ – вероятность выбора обобщенного алгоритма обработки информации при выборе между обобщенным и узкоспециальным алгоритмами. Чем выше коэффициент абстрактности тем меньше при прочих равных условиях база данных по алгоритмам, больше универсальность, меньше объем технологической информации, больше быстродействие в решении сложных задач, больше вероятность создания новых удачных алгоритмов.
УРОВЕНЬ УСЛОВНОСТИ – уровень абстрактности, обобщенности понятия.
КОЭФФИЦИЕНТ АРТИСТИЧНОСТИ – отношение порога терпимости к его носителю с стороны других носителей разума к среднестатистическому уровню терпимости.
АРТИСТИЧНОСТЬ – демонстрация одновременно и чрезмерной (по отношению к другим носителям разума) цели (или реакции на окружающую среду) и отсутствия стремления ее достигать в ущерб другим носителям разума. Характеризует способность предупреждать других носителей разума о своей способности точно подходить к границе терпимости не переходя ее. Увеличивает свободу действий.
ПОНТЫ – артистическая деятельность человека по представлению из себя важной персоны.
УРОВЕНЬ ТЕАТРАЛЬНОСТИ – передача информации публично обобщенными стандартными сюжетами, приемами.
ГЕНЕТИЧЕСКАЯ ПРОГРАММА – цель (обычно сильно обобщенная в начале жизни носителя интеллекта) задающая вектор эволюции + технологическая информация. Генетическая программа часто включает в себя список коэффициентов реакции на окружающую среду (коэффициент артистичности, коэффициент абстрактности...)
ТЕХНИЧЕСКАЯ ГЕНЕТИКА – наука о софте способном самостоятельно эволюционировать при доступе к информации внешней среды. В будущем будут проходить чемпионаты мира по скорости эволюции самоэволюционирующих софта в классах ограничения размеров софта.
КИБЕРНЕТИЧЕСКИЕ КОЭФФИЦИЕНТЫ – информационные функциональные элементы генетической цели (индивидуальности) человека или андроида. Разные профессии могут предъявлять противоположные требования для коэффициентов.
КОЭФФИЦИЕНТ ВНУШАЕМОСТИ – вероятность выбора толкования информации между 2 вариантами:
1. верю только своей логике, своей интуиции.
2. верю внешнему источнику информации (общественное мнение, школа, вуз, инструкция, другой человек.
Коэффициент внушаемости равен вероятности выбора варианта-2.
КОЭФФИЦИЕНТ РИСКА – вероятность выбора между вариантами:
1. достижение масштабной цели при высоком риске недостижения цели.
2. гарантированное достижение скромной цели.
Коэффициент риска – вероятность выбора варианта-1.
КОЭФФИЦИЕНТ СООТВЕТСТВИЯ ГЕНЕТИЧЕСКОЙ ПРОГРАММЕ – один из коэффициентов алгоритма определяющего выбор между вариантами:
1. продолжать действия в данном направлении
2. прекратить действия в данном направлении
КОЭФФИЦИЕНТ ОБРАТНОЙ СВЯЗИ С ОКРУЖАЮЩЕЙ СРЕДОЙ – вероятность продолжения решения задачи приближения окружающей среды к своей желаемой модели окружающей среды при превышении ожидающейся трудоемкости достижения цели вдвое. Обратная связь с окружающей средой считают положительной, если коэффициент обратной связи с окружающей средой > 50%, отрицательной в остальных случаях. Коэффициент обратной связи с окружающей средой носителя разума зависит от соответствия темы генетической программе, от правил игры в обществе, от возможностей носителя разума. У большинства людей генетическая программа – алгоритмы + список кибернетических коэффициентов + технологическая информация (информация о сборке человека и материалов для сборки).
КОЭФФИЦИЕНТ МОБИЛИЗАЦИИ – это в процентах от требуемого для данной ситуации, время быстрого роста управляемых ресурсов для достижения цели.
ВЕРОЯТНОСТЬ СОЗДАНИЯ ЦЕЛИ – один из коэффициентов алгоритма, определяющего выбор между вариантами:
1. продолжать действия в данном направлении
2. прекратить действия в данном направлении
ВЕРОЯТНОСТЬ ДОСТИЖЕНИЯ ЦЕЛИ – один из коэффициентов алгоритма определяющего выбор между вариантами:
1. продолжать действия в данном направлении
2. прекратить действия в данном направлении
ЗАДАЧА – это несоответствие окружающей среды желаемой модели окружающей среды полученное при эволюции генетической программы в процессе обратной связи с окружающей средой.
РЕШЕНИЕ ЗАДАЧИ – действия для исключения противоречия между окружающей средой и желаемой моделью окружающей среды в сознании, в подсознании.
ЖЕЛАЕМАЯ МОДЕЛЬ ОКРУЖАЮЩЕЙ СРЕДЫ – план генетической программы по изменению окружающей среды, повышающий вероятность достаточно безопасного самораспространения в пространстве (количественный параметр обратной связи с окружающей средой) с продолжением эволюции (качественный параметр обратной связи с окружающей средой). Желаемая модель окружающей среды – одна из форм вектора эволюции обратной связи с окружающей средой создаваемая генетической программой.
ВЕКТОР ЭВОЛЮЦИИ – общее тематическое направление эволюции.
ДАННОЕ НАПРАВЛЕНИЕ ДЕЙСТВИЙ – действия ограниченные целью или алгоритмом.
ПРИОРИТЕТ – место в иерархии значимости. Больше значимость – больше, выше приоритет.
СПРАВА – слово, означающее расположение объекта(ов) внимания в правой полусфере объекта(ов) базирования.
СЛЕВА – слово, означающее расположение объекта(ов) внимания в левой полусфере объекта(ов) базирования.
ВЕРХНЯЯ ПОВЕРХНОСТЬ ОБЪЕКТА БАЗИРОВАНИЯ – поверхность объекта базирования, видная в проекции сверху.
НИЖНЯЯ ПОВЕРХНОСТЬ ОБЪЕКТА БАЗИРОВАНИЯ – поверхность объекта базирования, видная в проекции снизу.
ЛЕВАЯ ПОВЕРХНОСТЬ ОБЪЕКТА БАЗИРОВАНИЯ – поверхность объекта базирования, видная в боковой проекции слева.
ПРАВАЯ ПОВЕРХНОСТЬ ОБЪЕКТА БАЗИРОВАНИЯ – поверхность объекта базирования, видная в боковой проекции справа.
ПРЕДЛОГ – (в человеческом языке) указатель на один из 3 вариантов действия на объект:
1. первоисточник действия на объект.
2. транзитный переносчик действия на объект.
3. объект на который производится действие.
НА – означает контактное позиционирование объекта внимания в верхней полусфере другого объекта.
ПОД – предлог означающий расположение объекта(ов) внимания на нижней поверхности объекта(ов) базирования или ниже ее.
ОТ – предлог назначающий расстояние объекта(ов) внимания от объекта(ов) базирования.
С – предлог означающий расположение объекта(ов) внимания рядом с объектом(ами) базирования.
СО – предлог означающий расположение объекта(ов) внимания рядом с объектом(ами) базирования с ограничением максимального расстояния до него.
В:
1. В – предлог, означающий расположение объекта(ов) внимания на поверхности объекта(ов) базирования или внутри него.
2. В – предлог назначающий объект(ов) базирования как навигационную систему координат объекта(ов) внимания.
ЕТ – окончание глагола, описывающего одиночный объект действия.
ЮТ – окончание глагола, описывает обобщенное действие множественного числа объектов действия.
ЭТО – слово обобщающее информацию об объекте внимания на все объекты-аналоги.
С – приставка в начале глагола, означающее быстрое действие от сигнала.
РАС – приставка к передней части слова. Означает «самое заметное», «самое доступное».
ЗА:
1. ЗА – предлог, означающий расположение объекта(ов) внимания сзади объекта(ами) базирования в его задней полусфере.
2. ЗА – предлог означающий вхождение объекта(ов) внимания в список объектов целевой положительной обратной связи с объектом базирования.
А:
1. А – предлог означающий начало действия в предложении глагола противоположного использованному.
2. А – предлог означающий начало использования в предложении слов(а), не совпадающего по смыслу с предыдущими(им).
ПРОТИВ – слово, означающее вхождение объекта(ов) внимания в список объектов целевой отрицательной обратной связи с объектом(ами) базирования.
ПРИЗНАКИ ОКОНЧАНИЯ ПРОЦЕССА – список изменений датчиковых сигналов, являющийся сигналом к запуску нового алгоритма или выключения.
АНАЛИЗАТОР ОБОБЩЕННЫХ РАЗЛИЧИЙ – в софте искусственного интеллекта приоритетный список алгоритмов, выделяющих обобщенные признаки различий объектов сравнения.
НЕКОТОРЫЕ – слово означающее величину < 50%.
МНОГИЕ – слово означающее величину > 50%.
КИБЕР – приставка спереди к слову, означающая интерфейс «человек-техника».
КАЧЕСТВЕННАЯ ХАРАКТЕРИСТИКА – статическая характеристика объекта или процесса.
КОЛИЧЕСТВЕННАЯ ХАРАКТЕРИСТИКА – динамическая характеристика объекта или процесса.
ИЕРАРХИЯ – способ организации при которой нижестоящие ступени организации подчиняются вышестоящим. Иерархия – приоритетная архитектура организации. Абсолютная иерархия – способ организации, при которой любые нижестоящие объекты или ступени управления подчиняются вышестоящим. Ограниченная иерархия – иерархия по принципу: подчиненный моего подчиненного не мой подчиненный.
ИЕРАРХИЯ ВЕРТИКАЛЬНАЯ – иерархия, при росте ресурсов предпочитающая расти больше вертикально, чем горизонтально. Горизонтальная иерархия – иерархия, которая при росте ресурсов увеличивает скорее число объектов в каждой ступени управления чем число ступеней управления. Иерархические типы менталитета:
1. вертикальный иерархический тип менталитета – склонность человека к сверсложным механизмам вертикальной иерархии. Пример: коммунисты в СССР (государство – монопольная вертикально-иерархическая корпорация, первоисточник: монотеизм).
2. горизонтальный иерархический тип менталитета – склонность человека к предельно упрощенной организации работ.
ИЕРАРХИЯ ГОРИЗОНТАЛЬНАЯ – иерархия элементов с примерно равными правами, в которой можно в системе убрать элемент-1 в горизонтальной иерархии, но система все равно продолжит выполнять свои функции. Даже если убрать большую часть элементов горизонтальной иерархии система работает. Вертикальная иерархия – иерархия, в которой изъятие элемента в вертикальной иерархии системы может уничтожить часть ее функций или саму систему, если нет дополнительной неработающей, но готовой к работе системы дублирования элементов вертикальной иерархии или системы автоматического выбора нового элемента взамен отказавшего. Эволюция сложных систем требует наличия горизонтальной и вертикальной иерархии.
ОБВИНЕНИЕ – (в общем, кибернетическом смысле) требование нанести потери объекту, в связи с тем, что этот объект нанес или наносит недопустимые, по принятым правилам игры, потери другим объектам. Обвинение (в общем, кибернетическом смысле) – требование что либо изменить в объекте в связи с тем, что объект нанес или наносит недопустимые, по принятым правилам игры, потери другим объектам.
СПРАВЕДЛИВОСТЬ – (в общем, кибернетическом смысле) выбор таких правил игры, при которых эволюция идет быстрее.
ПРАВИЛА ИГРЫ – целевые механизмы наказания, поощрения в обществе.
СОДЕРЖАНИЕ – цель или список функций.
ФОРМА – техническое или информационное средство достижения цели.
ИСКУССТВЕННЫЙ – созданный разумом, а не природой.
ИНТЕЛЛЕКТ – способность создавать новые знания как результат работы созданных интуицией алгоритмов анализа, синтеза информации.
РАЗУМ – способность по информации от окружающей среды создавать незапрограммированные цели, достигать их для повышения жизнеспособности своей формы жизни. Разум – способность на основе логических эталонов создавать алгоритмы создания новых алгоритмов обработки информации. Разум – стремление носителя сетевого сознания к общественно-полезной цели, выходящей за пределы выживания носителя сетевого сознания в экологической нише.
СОЗНАНИЕ:
1. сознание – интерфейс между интуицией разума и другими разумами.
2. сознание – способность разума различать, запоминать, использовать в своих интересах факторы, противодействующие, нейтральные и благоприятные для него.
3. сознание – способность носителя жизни к оценке потерь при выборе действия.
4. сознание – способность носителя жизни к оценке уровня масштаба, универсальности объекта.
МЫШЛЕНИЕ – способность создавать новые алгоритмы обработки информации. Вначале выбор между алгоритмом анализа и алгоритмом синтеза. Пример: выбран алгоритм анализа. Затем алгоритм анализа создает список вариантов движения к цели. Затем делит список на 2 группы, выбирает одну. Эту группу алгоритм анализа снова делит на две, снова выбирает одну. Процесс повторяют до его прекращения алгоритмом «анализ-синтез». Затем алгоритм сканирования логических эталонов находит эталон близкий к этому шагу движения к цели, производит операцию уточнения шага. Шаг движения к цели – это объект (сравнивают с логическими эталонами объектов), или действие (сравнивают с логическими эталонами действия), или характеристика объекта (или действия)(сравнивают с логическими эталонами характеристик). Чем обобщеннее логические эталоны, тем их меньше, при прочих равных условиях, тем меньше сложность технологии поиска, тем больше быстродействие и вероятность создания новых удачных алгоритмов.
ЛОГИКА – способность создать полезную информацию, которой нет в памяти, датчиках. Логика – алгоритмы обработки информации. Логика – способность создавать цель на основе логических эталонов. Логика высокого уровня – способность создавать логические эталоны.
ЛОГИЧЕСКИЙ ЭТАЛОН – стандартное средство достижения цели соответствующее стандартной цели. Одна стандартная цель может в списке логических эталонов соответствовать нескольким стандартным средствам достижения цели с разной степенью обобщенности (абстрактности) структуры этих средств.
ЭТАЛОН:
1. лучший шаблон обобщенного смысла понятия, объекта или системы.
2. эталон – лучший функциональный шаблон.
3. эталон – популярная мера параметра или качества объекта.
ЛИЧНОСТЬ – способность разума быть целенаправленно действующим в направлении эволюции своей генетической программы при сильном противодействии.
ЦЕЛЕУСТРЕМЛЕННОСТЬ – готовность длительно платить большую цену для достижения цели.
ТОН ПРОИЗНОШЕНИЯ – вкладывание в слово эмоции носителем разума.
ОБВИНИТЕЛЬНЫЙ ТОН ПРОИЗНОШЕНИЯ СЛОВА – увеличение частоты звука в букве, относительно стандартной частоты звука, при произнесении слова. Частота звука возрастает одинаково в всех буквах слова.
ВОПРОСИТЕЛЬНЫЙ ТОН ПРОИЗНОШЕНИЯ СЛОВА – увеличение длительности звучания буквы, на которую ставят ударение, относительно стандартной длительности звучания.
ПРЕДУПРЕДИТЕЛЬНЫЙ ТОН ПРОИЗНОШЕНИЯ СЛОВА – увеличение длительности звучания буквы, на которую ставят ударение, относительно стандартной длительности звучания. И уменьшение частоты звучания последующих букв.
УГРОЖАЮЩИЙ ТОН ПРОИЗНОШЕНИЯ СЛОВА – увеличение частоты звука в букве, относительно стандартной частоты звука, при произнесении слова. Частота звука растет от 1-й буквы слова к последней букве.
ДЕЙСТВИЕ:
1. действие – внесение изменений в внешнюю среду.
2. действие – внесение изменений в свою внутреннюю материальную среду носителем интеллекта.
3. действие – внесение мозгом (компьютером андроида) серьезных изменений в свою внутреннюю информационную среду.
4. действие – изменение координаты, качества, информационной характеристики, параметров объекта.
5. действие – оздействие объекта на другой объект.
ДЕЙСТВИЕ НА ОБЪЕКТ – изменение характеристики объекта или типа действия объекта на окружающую среду.
ИЗМЕНЕНИЕ ТИПА ДЕЙСТВИЯ ОБЪЕКТА – выбор из списка качественно разных изменений динамических или потенциальных характеристик действий объекта на окружающую среду.
ИЗМЕНЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ОБЪЕКТА НА ОКРУЖАЮЩУЮ СРЕДУ – физико-химическое или информационное изменение объекта.
ФИЗИКО-ХИМИЧЕСКОЕ ИЗМЕНЕНИЕ ОБЪЕКТА – изменение структуры или энергетических параметров объекта.
ИНФОРМАЦИОННОЕ ИЗМЕНЕНИЕ ОБЪЕКТА – изменение компьютерной программы объекта (программы мозга человека, животного, робота).
ОБЪЕКТ – временная, пространственная, материальная, энергетическая или информационная структура. Объект – законченная в данном масштабе среды структура, имеющая взаимосвязанные между собой части. Объект становится неполным или прекращает существование при удалении с структуры ключевых частей объекта. Объекты делят на:
1. структура с обобщенным именем (имя нарицательное)
2. структура с индивидуальным именем (имя собственное)
СУБЪЕКТ – разновидность объекта с сознанием и индивидуальным именем (имя собственное).
СТРУКТУРА:
1. структура – нечто стабильное в свойствах в промежутке времени, пригодном для практического использования этого знания.
2. структура – нечто постоянное в определенный, для данного класса явлений или объектов, период времени.
3. структура – информация характеризующая информационное или материальное отличие объекта от окружающей среды.
СТРУКТУРИРОВАННЫЙ ОБЪЕКТ – объект с условленным уровнем структуризации.
СТРУКТУРИЗАЦИЯ:
1. структуризация – усложнение или изменение структуры от эволюции или энтропии.
2. структуризация – процесс появления новых материальных, энергетических или информационных связей.
СТРУКТУРИЗАЦИЯ ЭВОЛЮЦИОННАЯ:
1. структуризация эволюционная: баланс 2 процессов: а)появление новых материальных или информационных связей. Нет новых связей – нет эволюции. б)разрушение существующих материальных или информационных связей. Нет разрушения связей, мешающих улучшению существующих или появлению новых функций – нет эволюции.
2. структуризация эволюционная: структуризация по принципу оптимума: не слишком мало, не слишком много. Чрезмерная структуризация останавливает эволюцию, направляет ее назад. Минимальный уровень структуризации зависит от технологического механизма эволюции.
ВНУТРЕННЯЯ СТРУКТУРА ОБЪЕКТА – невидимая глазом информация, характеризующая информационные, материальные отличия объекта от окружающей среды.
ВНЕШНЯЯ СТРУКТУРА ОБЪЕКТА:
1. внешняя структура объекта – видимая глазом информация, характеризующая информационные или материальные отличия объекта от окружающей среды.
2. внешняя структура объекта – это информационно-энергетическое воздействие объекта на окружающую среду с целью получения информации о структуре окружающей среды. Или с целью воздействия на другие объекты.
САМОСТРУКТУРИРОВАНИЕ – функциональное или материальное изменение или самоусложнение структуры без внешнего воздействия.
ЭМОЦИЯ:
1. Эмоция – коэффициент значимости, уровень приоритета цели по времени и масштабу времени.
2. Эмоция – выражение отношения к объекту, событию.
ЭМОЦИОНАЛЬНЫЙ ОБРАЗ – минимальный список обобщенных образов построенных из минимального списка самых распространенных эмоций.
МУЗЫКА – звуковой эмоциональный допинг, генератор настроения.
ПОТЕРЯ ФУНКЦИЙ ОБЪЕКТА – потеря способности объекта влиять на свою внутреннюю или окружающую среду.
ПОТЕРИ – это потеря способности объекта влиять на окружающую среду. Потери делят на:
1. потерю по массе
2. потерю по энергии
3. потери по информации
4. потери времени
5. потери по влиянию на параметр
ВЕРОЯТНОСТЬ ТРАНСПОРТИРОВКИ БЕЗ ПОТЕРЬ – цифра вероятности потерь, вызванных столкновением, другим процессом при транспортировке массы, энергии или информации.
СОВЕРШЕНСТВО – это когда объекта (системы) нет, но все его функции выполняются с требуемыми количеством, качеством.
ПОЛЬЗА – приближение к цели.
ЭВОЛЮЦИЯ – процесс изменений в функциональном объекте, ведущий к повышению количества и (или)качества выполнения функций объектом.
УРОВЕНЬ ЭВОЛЮЦИИ – степень приближения к совершенству.
СТУПЕНЬ ЭВОЛЮЦИИ – переход к использованию нового, по функциональным возможностям, технологического механизма эволюции.
ТЕХНОЛОГИЧЕСКИЙ МЕХАНИЗМ ЭВОЛЮЦИИ:
1. технологический механизм эволюции – качественно новый способ наращивания количества или качества функций объектом.
2. технологический механизм эволюции – способ появления новых материальных или информационных связей.
3. технологический механизм эволюции – способ разрушения материальных или информационных связей, мешающих улучшению существующих или появлению новых функций. Такие способы: агрессивная химическая среда, радиация…
ВРЕМЯ – количество эталонного движения.
РЕЗУЛЬТАТ – достигнутая цель.
ЦЕЛЬ:
1. цель – модель окружающей среды, к которой надо привести окружающую среду.
2. цель – список функций, которые надо выполнить.
3. цель – действие необходимое для решения задачи.
СРЕДСТВО – материальная, информационная структура достижения цели.
ФУНКЦИОНАЛЬНЫЙ ЭЛЕМЕНТ – материальная часть материального объекта выполняющая данную функцию. Или часть программного кода компьютерной программы выполняющая данную функцию. Или часть программы (информация) мозга (нервной системы) у живых организмов выполняющая данную функцию. И материальные (или информационные) разные функциональные элементы могут быть иногда взаимно неотделимы (общие детали).
СЕТЕВОЕ СОЗНАНИЕ – алгоритмы сетевого взаимодействия носителя сознания с другими носителями сознания связанных в сеть общественных отношений носителей сознания.
ПЕРЕДАТЧИК ИНФОРМАЦИИ – датчик или носитель разума или сознания, количественно или качественно оценивающий информацию по параметрам базовых понятий разума или сознания и передающий ее приемнику информации.
ПРИЕМНИК ИНФОРМАЦИИ:
1. приемник информации – исполнительный элемент или компьютер исполнительного элемента, относительно базовых понятий или параметров которого дается информация.
2. приемник информации – носитель разума или сознания, для базовых понятий которого дается информация.
АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ – порядок, последовательность действий для достижения цели.
ИНФОРМАЦИОННАЯ ПЕДЕРАСТИЯ – принуждение учащихся к запоминанию лишней «профессиональной» информации, вызывающее профессиональное выгорание человека, снижающее профессиональную конкурентоспособность, ограничивающее доступ к альтернативным источникам профессиональной информации. Понятие «профессиональная информация» определяют работодатели, учащиеся.
КОММУТАЦИОННАЯ МОДЕЛЬ РАЗУМА – достижения компьютерной программой разума через программную коммутацию файлов с алгоритмами и файлов с базой данных. Позволяет андроидам-солдатам иметь абсолютно одинаковые мозги, быть предсказуемыми. В отличие от андроидов-солдат с нейронным компьютерным мозгом, которые дольше обучаются. Длительность обучения одна из причин поражения Японии, Германии в Мировой войне-2. У них к концу войны скопилось много самолетов, танков, подводных лодок, другой техники на которую невозможно было в сроки качественно обучить людей.
ЖИЗНЬ:
1. жизнь – способность материальных объектов с защитной обратной связью с окружающей средой это к материальному самокопрованию.
2. жизнь – материально самокопирующаяся материальная структура.
3. жизни техническая форма – форма жизни без самокопирования на атомном уровне.
4. жизни нетехническая (нанотехнологическая) форма – форма жизни, самокопируемая на атомном уровне.
5. жизни монокопируемая форма – форма жизни, самокопирующаяся без партнера.
6. жизни бикопируемая форма – форма жизни, требующая 2 особи разного пола для самокопирования.
7. жизни поликопируемая форма – форма жизни, самокопирующаяся промышленным способом.
8. жизни органическая форма – форма жизни с материальной структурой более чем на 50% по массе состоящей из органических материалов.
9. жизни неорганическая форма – форма жизни с материальной структурой более чем на 50% по массе состоящей из неорганических материалов.
10. жизни форма органического энергопотребления – форма жизни, потребляющая энергию из органических энергоносителей.
11. жизни форма неорганического энергопотребления – форма жизни, потребляющая энергию из неорганических энергоносителей.
12. жизни форма электромагнитного энергопотребления – форма жизни, потребляющая энергию в электромагнитной форме.
13. жизни форма электрического энергопотребления – форма жизни, потребляющая энергию в электрической форме.
14. жизни разумная форма – форма жизни имеющая разум.
15. жизни неразумная форма – форма жизни не имеющая разум.
16. жизни сознательная форма – форма жизни имеющая сознание.
17. жизни бессознательная форма – форма жизни не имеющая сознания.
ОСНОВА ПОЯВЛЕНИЯ ЖИЗНИ – информационный протокол РНК-ДНК помогающий молекулам вещества самостоятельно собираться в живой объект. Для образования информационного протокола типа РНК-ДНК необходимы время порядка миллиардов лет, жидкость или газ как окислитель в определенных диапазонах давлений и температур, наличие необходимых веществ в окружающей среде.
Жидкость или газ реагируя с веществом окружающей среды дают энергию, необходимую для сборки живого объекта и его жизнедеятельности. Чем выше давление и температура среды, тем выше вероятность образования информационного протокола типа РНК-ДНК.
Всё живое на Земле возникло с одного единственного одноклеточного микроорганизма в результате эволюции в течение двух миллиардов лет. Об этом говорят одинаковые 4 нуклеотида (всего 4. Возможны тысячи), 20 аминокислот (всего 20. Возможны тысячи), одинаковый информационный протокол РНК-ДНК всех форм жизни на Земле.
ЗАКОНЫ ПРИРОДЫ – законы действующие независимо от воли форм жизни.
ЗНАЧИМОСТЬ – способность влиять на прогноз действия или события.
ТЕХНОЛОГИЧНОСТЬ:
1. технологичность – минимум требований к точности изготовления товара.
2. технологичность – максимальная простота, минимальная стоимость оборудования для производства, техобслуживания товара.
3. технологичность – минимум требований к качеству материалов для изготовления товара.
ВЫСОКОТЕХНОЛОГИЧНОЕ:
1. высокотехнологичное – более многофункциональная или более качественная технология.
2. высокотехнологичное – технологичность наоборот (нетехнологичное).
МЕНТАЛИТЕТ – отпечаток наложенный на сознание человека окружающей средой.
АБОРИГЕН – коренной житель данной территории в пределах условного числа поколений или времени проживания его предков на данной территории.
СПОРТ – соревнование, смысл которого не уравнять шансы (лотерея – противоположность спорта) спортсменов и команд, а максимально точно найти самых сильных спортсменов, самые сильные команды, публично воздать им честь за превосходство. Не забыв упомянуть стоящих после них. Спорт не бизнес, не шоу: можно делать деньги на соревнованиях, но не за счет отказа от принципов спорта.
В спорте есть принцип равноправия – любой человек или команда имеют право участвовать в отборочных соревнованиях и выйдя в финал участвовать в главных соревнованиях.
СПРИНТ – дистанция бега в которой половина профессиональных бегунов приземляются на носки ступней, а не на пятки.
СПРИНТЕРСКИЙ БЕГ – бег с низким положением центра масс тела, с сильно согнутыми в нижней точке бега центра масс тела ногами, с приземлением на носки ступней.
ОТВЕТСТВЕННОСТЬ:
1. ответственность – список соответствующих наказаний за невыполнение обязанностей.
2. ответственность – обязанность выполнить список обязанностей.
ОТВЕТСТВЕННЫЙ:
1. ответственный – программа в мозгу или в компьютере, несущая список обязанностей.
2. ответственный – носитель ответственности.
ЭКСТРЕМИЗМ – это переход человека или организации за определенные пределы, это:
1. достижение спортивного предела
2. достижение профессионального предела
3. выход за пределы законов
Применение слова экстремизм в Уголовном кодексе незаконно – в юридической науке недопустимы многозначные понятия непригодные для свободного использования научной логики. Наука основана на однозначных понятиях. Юридически незаконно применение в законах многозначных понятий «экстремистский», «экстремист» – созданы с целью заблокировать логику адвоката.
НАУЧНАЯ ЛОГИКА – логика не противоречащая научным принципам познания мира и научным фактам.
ЖРЕЦ – это в любой религии профессиональный исполнитель религиозных ритуалов, имеющий некоторую религиозную власть. В научном смысле слово «жрец» относится к любым религиям без деления на монотеистических, других. Примеры жрецов: христианский священник, мулла, раввин. В светских странах основной смысл слов – по принципам науки, в религиозных странах – по классовым интересам религиозных чиновников. Смысл слова «жрец» в светских и религиозных странах различается.
ТОТЕМ это:
1. предмет являющийся эмоциональным символом религиозной или социальной группы людей.
2. не имеющий сознания объект религиозного поклонения, мертвый предмет якобы дающий сверх естественные возможности. Пример: христианские икона, мощи святых.
ИДОЛ:
1. идол – объект религиозного поклонения, обладающий сознанием.
2. идол – объект поклонения обладающий сознанием.
Научный смысл слова «идол» определяют ключевые понятия «религия», «объект поклонения», «сознание», но не определяют понятия «монотеизм», «политеизм». В светских странах основной смысл слов – по принципам науки, в религиозных странах – по религии. Смысл слова «идол» в светских и религиозных странах различается.
МОРАЛЬ – правила игры, ограничивающие индивидуальный, коллективный, клановый, профессиональный, классовый и другие виды эгоизма.
СОВЕСТЬ – стремление человека уменьшить потери общества от своего или чужого эгоизма. Религия не совесть – законы религий противоречат созидательным правам человека, Уголовному кодексу и интересам гражданского общества, представляя собой классовые интересы силовиков.
ДУХОВНОСТЬ – постоянная настроенность мозга на цель востребованную обществом, частью общества. Виды духовности:
1. профессиональная духовность – сильная настроенность носителя разума на достижение профессиональной цели
2. менталитетная духовность – соответствие менталитета человека преобладающим на данной территории программным установкам и настройкам власти
3. светская духовность – способность человека быть положительным притягательным центром компании; способность превращать компанию в источник положительных, для человека и общества, эмоций
4. религиозная духовность – соответствие менталитета человека преобладающим на данной территории догмам религии.
РЕЛИГИЯ – организуемая классом силовиков передача гражданами своих прав жрецам культов, продвигающих классовые интересы силовиков. Религия отрицает научную логику с научными фактами как основу познания мира, рассматривает человека как марионетку непознаваемых человеком сверхъестественных сил.
Для человека с религий например сознание человека – нечто сверхъестественное, что человек не может понять. Для человека с чисто научным мышлением сознание компьютерная программа мозга человека, которую можно создать и для робота.
Религия добивается замены научной логики верой без научных доказательств. Стремление к познанию мира религия заменяет эмоциями сверхценных идей Христа, уничтожающих стремление к познанию мира.
Религии созданы классом силовиков с целью принудить граждан ограничить свои права и возможности, чтобы граждане не стали богаче, влиятельнее класса силовиков племени, государства.
Религия – паразитическая форма предпринимательства (аферизм) жрецов (священников), обманывающих религиозников с целью достижения жрецами материальной выгоды или влияния в обществе. Религия не совесть – законы религий противоречат созидательным правам человека, Уголовному кодексу, интересам гражданского общества.
В племенах люди обогащались трудом или входили в банду вождя племени – подчиняли племя. Трудящиеся богатели, банды вождя нет. Банды объявив предметы святыми объектами поклонения создавали религии с целью повысить вероятность законно обвинить трудящихся в нарушении догм религии, отнять собственность, сделать рабами.
Религии часть классовых интересов класса силовиков, класса юристов. Остальные классы общества не нуждаются в антиобщественных целях религий.
БОГ – идол силовиков несущий идею – класс силовиков это Бог-рабовладелец, гражданское общество – рабы божьи. Идея быть классом рабовладельцев чтобы все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебников рабовладельцев Библия, Коран, обрекая гражданское общество на экономическое, политическое вырождение.
Класс силовиков христианских стран агентурой навязывает Бога гражданам с целью создания межнациональной, межрелигиозной вражды в гражданском обществе по принципу «разделяй и властвуй».
Именем Бога классом силовиков совершены множество преступлений против гражданского общества христианских стран в антиобщественных классовых интересах силовиков. Эти преступления сделали слово Бог символом абсолютной безнаказанности силовиков за преступления против гражданского общества.
От Бога общество защищает идея – граждан соединяет в государство Гражданский договор о государстве, в котором все классы общества равноправны, силовики временные (власть не передается по наследству) наемные работники не имеющие права на надобщественные интересы.
Граждане всерьез думающие – индивидум Бог появился без развития в обществе как Маугли, создал все звезды, галактики – это неадекватные граждане не имеющие права занимать должности с госвластью. Они неспособны осознавать – миром управляют законы научной логики, а не вера.
Склонность к вере – главный принцип генетического отбора (евгеника) в христианских странах, применяемый классом силовиков для выведения породы «идеальных граждан», не опасных для антиобщественных классовых интересов класса силовиков.
ЕВГЕНИКА БИБЛИИ – государственная система генетического отбора граждан ставящая целью Спасение души человека.
Спасение души человека – уничтожение нехристианских генотипов человека генетическим отбором для замены людей думающих обществом догматиков по принципу – в генетической программе человека не должно быть человеческих целей – только животные цели – чистый лист бумаги в который силовики запишут Библию, убьют в человеке все чисто человеческое, превратят в животное которое будет пасти Библия.
Евгеника Библии уничтожает генотипы граждан не соответствующих цели, блокируя им размножение.
Разведслужбы, Министерства обороны христианских стран сокращают человечество революциями; расчленяют страны с уничтожением людей войнами, эпидемиями.
Для организации эпидемий христиане в своих 330 зарубежных военно-бактериологических лабораторий ищут технологии стерилизации 7 миллиардов человек вирусами, вакцинами, болезнями. Христиане в 21 веке через ООН убили полмиллиарда африканских детей стерилизовав вакциной от столбняка 140 млн африканских женщин (у них 6-7 детей на семью).
В христианских странах агентура контрразведки массово навязывает однополые браки, чтобы не размножались. Христианские страны международными санкциями, экотиранией сокращают экономику и население нехристианских стран по плану «Золотой миллиард».
В России контрразведка (система страхования власти от гражданских войн и вмешательства иностранцев) организовала государственный атеизм и Коммунистическую революцию для убийства евгеникой Библии 50млн чел нехристианского генотипа. С аналогичной целью контрразведки Франции, Венгрии, Германии организовали свои Коммунистические революции, остановленные организованностью буржуазии.
Евгеника Библии началась с эксплуатации еврооккупантами иудейского мифа – придет иудейский царь, защитит иудеев от еврооккупантов. Агент еврооккупантов Иисус Христос пропагандировал коммунистическую идеологию созданную еврооккупантами для экономического геноцида народов Азии, Африки.
Студент парижского университета, член компартии Франции, агент Франции Пол Пот коммунистической идеологией очищал от людей Камбоджа. Вымышленный еврооккупантами агент Христос коммунистической идеологией очистил еврооккупантам от евреев их Родину. 30 сребреников агента европейцы внесли в Библию, платят предателям своих наций, стран. Никто так не сокращает человечество как герой евросказки Иисус Христос.
Агент Христос вел пропаганду против семьи, богатства, предпринимательства. Его коммунистическую идеологию контрразведка Рима пропагандировала с целью уравнять власть контрразведки с властью римского императора.
Идея быть классом рабовладельцев чтобы все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебника рабовладельцев Библии, обрекая гражданское общество на экономическое, политическое вырождение.
Общество в котором у граждан нет человеческих целей – вариант обратной эволюции человека к уровню развития мозга обезьян. Что в сочетании с ядерным оружием вариант ядерного самоубийства человечества.
СПАСЕНИЕ ДУШИ У ХРИСТИАН – уничтожение нехристианских генотипов человека генетическим отбором заменяющим людей думающих обществом догматиков по принципу – в генетической программе человека не должно быть человеческих целей – только животные цели – чистый лист бумаги в который силовики запишут Библию, убьют в человеке все чисто человеческое, превратят в животное которое будет пасти Библия.
Спасение души у христиан – это достижение классом силовиков полной предсказуемости (человек-робот, «идеальный гражданин») человека по госидеологии Библии. В будущем растет вероятность скрытого от общества клонирования силовиками в неограниченных количествах «идеальных граждан».
Общество в котором у граждан нет человеческих целей – вариант обратной эволюции человека к уровню развития мозга обезьян. Что в сочетании с ядерным оружием вариант ядерного самоубийства человечества.
ИСПОВЕДЬ – чисто христианский ритуал стукачества, в котором христианин стучит на себя чиновнику христианской религии. Ритуал исповеди одно из исторических доказательств того, что все террористические религии созданы классом силовиков.
СОБОРНОСТЬ – коллективизации принятия госрешений по антиэлитарным (христианский принцип социального равенства – диктатура дураков) принципам интеллектуального равенства голосующих правящих кланов силовиков.
ЛИЦО ХРИСТИАНСКОГО МЕНТАЛИТЕТА – это зараза Коммунизма и социального равенства, лицо коммунистического менталитета.
АНТИХРИСТИАНСКИЕ ПАРТИИ – партии защищающие гражданское общество от законов, секретных инструкций, госидеологий основанных на преступных человеконенавистнических принципах Евангелия (учебник коммунистов).
АНТИХРИСТИАНСКИЕ ОРГАНИЗАЦИИ – организации с системой безопасности не допускающей проникновения в организацию и ее мероприятия преступных человеконенавистнических принципов Библии (учебник коммунистов).
АНТИХРИСТИАНСКИЙ КОДЕКС – список преступных человеконенавистнических принципов Христа, использование которых в работе антихристианской организации карается ею. Примеры преступных принципов:
1. принцип изначальной виновности человека
2. принцип социального равенства людей вместо юридического и профессионального равноправия
3. принцип максимума оплачиваемого труда (христианская экономическая наука)
4. заповедь-2 Библии: нельзя никого и ничего любить
5. запрет профессиональной чести для Создателей
6. принцип не заботься о завтрашнем дне
7. принцип коллективизации труда
8. принцип кто возвышает себя, тот унижен будет
9. принцип кто хочет быть первым между вами, да будет вам рабом
10. по мере изучения Библии могут быть выявлены другие преступные принципы
ТОВАР:
1. объект продажи
2. услуга за деньги
3. все, за что кто-то получает деньги
ПОЛИТЭКОНОМИЯ – идеология монопольного контроля правящих кланов силовиков над финансовыми потоками в государстве, для блокировании финансовых возможностей неправящих кланов гражданского общества под предлогом защиты государства от иностранных финансовых сил.
КОНТРРАЗВЕДКА – система страхования власти от гражданских войн и вмешательства иностранцев, страховое агентство страхующее власть правящих кланов племени или государства.
Контрразведка работает по идеологии страхового агентства – это
Профессиональная идеология контрразведки:
1. запрещено увеличивать влияние человеческого фактора
2. все процессы организации должны быть стабильны. Нестабильность карается
3. профессиональная конкуренция запрещена или сильно ограничена
4. бойкот универсальных специалистов
5. работа людей ориентирована на максимум личных связей
6. все работает как структура с максимумом (сбор информации) взаимных связей между элементами
7. структура требует одновременной работы большого числа узкоспециализированных элементов
8. узкая специализация людей. Их ответственность коллективизируется
9. запрещены взаимно независимая работа элементов структуры
10. запрещены универсальные элементы структуры
Агенты контрразведки проникая в предприятия, идеологией доводят до банкротства в условиях конкуренции на рынке. Контрразведка законами уничтожает профессиональную конкуренцию специалистов, конкуренцию предприятий (территориальный монополизм) на рынке. Это ведёт государство к экономическому краху.
Попытки контрразведки решить экономические, военные проблемы государства напоминают попытки решить проблему оптимизации Уголовного Кодекса юристами. Юристы наоборот максимально запутают Уголовный Кодекс чтобы политически усилить класс юристов, увеличить его финансирование гражданским обществом.
Только класс инженеров может оптимизировать Уголовный Кодекс, принципы, законы государства, сведя их к малому числу универсальных законов, принципов. Тогда 99% юристов, 80% силовиков станут не нужны. Это причина скрытой классовой войны контрразведки против класса инженеров и изобретателей.
В эпоху рабовладельческого общественного строя формой давления на идеологию контрразведки была религия. Религия как идеологический вирус созданный классом богатых рабовладельцев, подчинял идеологию контрразведки интересам класса рабовладельцев.
Наиболее часто встречающиеся черты религий, как идеологических вирусов: создание механизмов отвлечения народа от стремления повысить свой уровень жизни (пропаганда бедности для народа), создание механизмов кастрации интеллекта народа через максимальную загрузку его трудом, искусственное создание проблем с жильем для народа, внушение народу идеи об отказе от потребностей. Подавление потребностей в человеке в зародыше уничтожает в нем экономического конкурента господствующего рабовладельческого класса.
Феодальный общественный строй: переход на универсальные юридические принципы типа – вассал моего вассала не мой вассал. Правила игры обобщались, упрощались из-за обеднения наследников феодалов от быстрого размножения феодалов.
Рост налогов от буржуазии, вызванный этим рост политической конкуренции между быстро размножающимися правящими кланами силовиков, привел к обобщению принципов страхования власти правящих кланов по уровню их влияния на безопасность государства – кастовая система профессиональных прав.
Контрразведку называют госбезопасностью. Госбезопасность – безопасность власти правящих кланов силовиков. Кроме безопасности государства есть безопасность страны. Безопасность страны – это безопасность государства + безопасность гражданского общества от грабежа и идеологического бандитизма государства. Контрразведка обычно не занимается безопасностью гражданского общества. Это пока нерешенная проблема безопасности многих стран.
Если сравнить государство с компьютером, контрразведка – антивирусная программа. Антивирус может иногда создать больше проблем, чем вирусы от которых он должен защищать.
КОНТРРАЗВЕДКА ХРИСТИАНСКИХ СТРАН – организация мстителей – идеологических силовиков мстящих гражданам за невыполнение коммунистической идеологии еврейского царя Иисуса Христа. Это иностранные агенты служащие иностранцу – еврейскому царю Христу, а не стране, не гражданскому обществу. Они глубинное государство христианских стран. Кроме функции мстителей они выполняют функцию страхового агентства страхующего власть правящих кланов силовиков государства.
СИЛОВИК – носитель профессиональной власти, употребляемой против нарушителей законов, инструкций, правил.
ИДЕОЛОГИЧЕСКОЕ ГОСУДАРСТВО – государство с госидеологией.
ГОСИДЕОЛОГИЯ – это имеющий силу закона для всех граждан список принципов правящего класса, приоритет которых меняет ситуация. Госидеология неподсудна в отличие от законов, которые может отменить Верховный Суд.
Неподсудность госидеологии – самая опасная угроза гражданскому обществу. Госидеологии марксизм в России, национал-социализм в Германии из-за неподсудности убили более 100 млн чел. Для защиты гражданского общества в Конституции должен быть запрет на госидеологию. Её заменяют законы.
Для гражданского общества госидеология намного опаснее законов: порог терпимости госидеологии близок к нулевому, в отличие от законов.
Госидеология – система обобщенных взглядов силовиков ставящая цель создать образ гражданина – врага государства. И под предлогом борьбы с гражданами-врагами создать рабочие места идеологических силовиков за деньги налогоплательщиков. Идеологический силовик – профессия происходящая от христианских инквизиторов не хотевших терять рабочие места.
Госидеология поддерживается насилием за невыполнение. Насилие обычно тайной агентурой, организуют идеологические силовики, применяющие агентурный или судебный гостеррор против гражданского общества за невыполнение госидеологии, за высказанное сомнение в её общественной полезности.
Признаки госидеологии:
1. неподсудность. Госидеологию нельзя опротестовать в Суде – у госидеологии юридический статус выше Судебных органов и разные государства прикидываются что госидеологии нет. Это катастрофа всей жизни для жертв госидеологии.
2. её используют силовики для распределения рабочих мест или бюджетных денег на госзаказы.
3. её используют силовики как карательный инструмент против гражданского общества.
Нельзя путать обычные требования государств с требованиями госидеологии, которые не зависят от современной ситуации, служат интересам только одного класса, служат классовой евгенике силовиков.
Госидеологии незаконны – обвинения против граждан должны быть сформулированы как официальные законы государства, чтобы гражданин мог реализовать конституционное право на адвоката.
Госидеология – карательная система государства с идеологическими силовиками, карающими (вредительство, поджоги, убийства...) агентурой граждан и организации за невыполнение госидеологии (Библия в христианских странах). Госидеология – карательная система работающая с постоянным нарушением официальных законов (подменены секретными инструкциями), прав человека.
Госидеология как карательная система не направлена против иностранцев. Госидеологию создает класс силовиков против наиболее интеллектуальной (обычно интеллигенция) части граждан с целью не дать им конкурировать за выгодные рабочие места с детьми и внуками силовиков, целенаправленно накачать возмущением или ненавистью против государства, затем агентурным гостеррором учить Родину любить.
У силовиков классовый интерес – создавать преступников, врагов государства для роста своего финансирования за счет новых налогов, штрафов, сборов, способов принудительного страхования граждан, собственности, предприятий.
Силовики тысячелетиями сочиняют госидеологии чтобы отнять у гражданского общества все способы защиты от государства. Больше всего в этом идеологически преуспели силовики древнего Рима, сочинив Новый завет Библии.
Идеологические силовики размножаясь быстрее гражданского общества, создают новые рабочие места идеологических силовиков своим детям, внукам. Рост процента идеологических силовиков в гражданском обществе приводит к конфликтам интересов между кланами, фракциями идеологических силовиков; приводит к жесткой бюрократизации государства и разрушению экономики государства с последующими госпереворотами, гражданскими войнами (скрытыми, открытыми).
Защиты государства и гражданского общества от госидеологий нет – идеологические силовики единственная госслужба, над которой отсутствует госконтроль. Кланы, фракции идеологических силовиков не заинтересованы в алгоритмах борьбы с противоречиями их организации, интуитивно понимая – алгоритмы снизят их численность, ликвидируют профессию идеологического силовика.
Доктрины государства, планы, внутренние документы крупных госструктур – не госидеологии. У них нет силы закона для гражданского общества.
ИДЕОЛОГИЯ – система создания принципов достижения цели, в общем виде исторически сложившаяся в религиозных, силовых и террористических организациях. Идеология не признает изменения своих принципов общим голосованием в отличие от науки. Идеология служит не истине как наука, а целям узкой группы общества. Наука служит всему человечеству.
Идеология стремится к засекречиванию работы своей организации, наука стремится к открытости своих организаций, к свободному доступу к научной информации. Идеология в отличие от философии, основана на механизмах применения насилия для её принудительного выполнения.
Идеология – это взгляд организации или класса общества, а не общества. Общество разнородно, у него нет четко выраженных взглядов.
Идеология государства – это имеющий силу закона для всех граждан список принципов правящего класса, приоритет которых меняет ситуация.
Идеология государства – это философия силовиков поддерживаемая насилием за невыполнение. Насилие против налогоплательщиков выполняют идеологические силовики за деньги налогоплательщиков. Идеология государства порождает паразитическую профессию – идеологический силовик, который применяет агентурный или уголовно-судебный гостеррор против гражданского общества не только за невыполнение, но и за высказанное сомнение в общественной полезности идеологии.
ИДЕОЛОГИЧЕСКИЙ – обоснованный для принудительного вмешательства.
ФИЛОСОФИЯ:
1. философия – достаточно универсальный список принципов достижения цели.
2. философия – обобщенная модель мира обобщенными словами.
3. философия – наука обобщения общественных логических эталонов.
ПОЛИТИЗАЦИЯ – рост вероятности карательных действий государства к гражданам, семьям, предприятиям по внутриполитическим, внешнеполитическим или идеологическим (госидеология) причинам.
ГОСОРГАНИЗАЦИЯ – не частная, не некоммерческая, не иностранная организация, работающая за деньги налогоплательщиков. Муниципальные организации – разновидность госорганизации: они в прямом подчинении госвласти, работают за деньги налогоплательщиков.
СТРАНА – организация в пределах госграниц с гражданским обществом и силовым аппаратом, обеспечивающим закон и порядок. Страна отличается от государства тем, что в понятие «государство» входит не всё гражданское общество и не вся собственность, а только класс силовиков и госсобственность.
ГОСУДАРСТВО – силовая организация в лице класса силовиков, обеспечивающая закон и порядок в стране, защищающая гражданское общество, свою территорию, юридическую систему и другие ценности. Госсобственностью распоряжается только класс силовиков. Частные военные компании не имеют госвласть, не являются госструктурой, требуют периодического продления их лицензии, подчиняются законам государства.
Государство финансируют налогоплательщики. Государство имеет принадлежащую ему территорию с охраняемыми границами, обладает правом суверенности и монополией на применение силы на своей территории.
Государство обладает правом на применение военной силы для защиты своей территории и своих граждан внутри или вне своей территории. Госидеология не признак государства.
ИДЕОЛОГИЧЕСКОЕ ГОСУДАРСТВО – государство функционирующее по принципам религиозного государства. Это гостеррор против граждан за критику идеологических идолов, за критику госидеологии, за помехи идеологической пропаганде государства в учебных заведениях...
ИДЕАЛЬНОЕ ГОСУДАРСТВО – организация силовиков нанятая гражданским обществом по Гражданскому договору, реализующего долговременные интересы гражданского общества.
КЛАСС ОБЩЕСТВА – профессиональная группа гражданского общества.
ОРГАНИЗОВАННЫЙ КЛАСС ОБЩЕСТВА – класс способный эффективно защищать свои классовые интересы, класс имеющий госвласть или частную собственность на средства производства + рыночный спрос на товар, услугу.
Пример организованных классов:
1. силовики. Имеют госвласть.
2. предприниматели. Имеют средства производства и рыночный спрос на товар, услугу.
Пример неорганизованных классов:
1. класс ученых. Не имеет ни госвласти, ни рыночного спроса.
2. рабочий класс. Не имеет частной собственности на средства производства.
Класс инженеров может быть организованным классом при наличии частной собственности на средства производства, товары, услуги.
БЮРОКРАТИЗАЦИЯ – переход на более узкую специализацию работников организации с усложнением профессиональной иерархии. Бюрократизация:
1. уменьшает индивидуальную ответственность людей за конечный результат работы организации. Трудно найти виновных.
2. вытесняет универсальных людей способных уловить взаимосвязи между темами в организации, узкими специалистами неспособными убрать противоречия между конечной целью организации и неработающими на неё средствами её достижения.
Бюрократизация коллективизирует профконкуренцию, собственность, человеческую мысль, ответственность. Вероятность бюрократизации быстро растет при увеличении числа людей в организации > ~400. Бюрократизация ориентирует организацию не достижение её конечной цели, а на сам процесс как религиозный ритуал.
ГОСПРЕДПРИЯТИЕ – предприятие принадлежащее классу силовиков по монопольному праву распоряжения собственностью. Государство – аппарат насилия в лице класса силовиков. Госсобственностью распоряжается только класс силовиков.
Госпредприятия юридически незаконны – это злоупотребление деньгами налогоплательщиков для экономической диктатуры класса силовиков в богатых секторах рынка – предпринимательством должны заниматься частные предприниматели и изобретатели, а не силовики в рабочее время – раздел госвласти и экономической власти. Законные госпредприятия – госбанк, торговля оружием.
Госпредприятия – результат классовой борьбы класса силовиков против остальных классов гражданского общества с целью экономической диктатуры класса силовиков.
Идеологический первоисточник госпредприятий – созданный еврооккупантами в Азии учебник рабовладельцев Евангелие, основанный на натравливании рабовладельцами общества против личного и семейного капитала рабов (социальное равенство запрещает рабам частную собственность, предпринимательство, эксплуатацию человека) для экономической, идеологической диктатуры рабовладельцев.
Идея быть классом рабовладельцев чтобы все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебника рабовладельцев Библии, обрекая гражданское общество на экономическое, политическое вырождение.
Госпредприятия построены по принципам Библии – предприятие состоит из рабовладельцев, рабов, надзирателей над рабами. Надзиратель выполняет функции принуждения, управления, учета, контроля, распределения. Надзиратель в 2-5 раз дороже раба. Рабовладелец экономя деньги прикрепляет к надзирателю максимум рабов через коллективизацию труда, укрупнение предприятий.
АНТИМОНОПОЛЬНАЯ СЛУЖБА – часть христианской налоговой системы, скрыто от гражданского общества принуждающая частные предприятия-монополистов рынка поднять цены до максимума для максимума сбора налогов. Не поднимут – штрафы, расчленение предприятия.
Антимонопольная служба должна быть заменена Службой равноправной конкуренции на рынке. Государство защищает равноправную конкуренцию на рынке.
Равноправная конкуренция и монополия – юридически разные понятия. Конкуренцию защищают господдержкой немонополистов, а не расчленением предприятия-монополиста или штрафами. У предпринимателей есть право на монополию на рынке при равноправности конкуренции обеспечиваемой госвластью (её обязанность, а не предпринимателя).
НАРОДНОЕ ПРЕДПРИЯТИЕ – предприятие которое:
1. не принадлежит лицам с госвластью
2. не принадлежит лицам из правящих кланов государства
НАРОД – частные лица без госвласти, не из правящих кланов государства.
ВЛАСТЬ – профессиональные права, делегируемые обществом носителю власти, для общественно полезного функционирования государства.
ДЕМОКРАТИЧЕСКОЕ ГОСУДАРСТВО – нанятое гражданским обществом по Гражданскому договору о государстве агентство из лояльных граждан выполняющих Гражданский договор о государстве.
Демократическое государство – государство соответствующее функциям демократии.
ДЕМОКРАТИЯ – система деполитизации государства по принципу минимизации вмешательства государства и корпораций в жизнь гражданина, в его предприятие, в жизнь его семьи. Демократия как система деполитизации государства выполняет следующие функции:
1. функция защиты гражданского общества от стремления класса силовиков скрытыми мерами увеличить преступность в обществе для «защиты общества» за деньги налогоплательщиков. Для «защиты общества» класс силовиков часто поднимает преступность лишними законами, законами против атеистов, несоразмерным наказанием по закону, нечеловеческими условиями содержания граждан в тюрьмах для превращения их в зверей.
2. функция защиты граждан, их семей от от грабежа, идеологического бандитизма государства через Конституцию, в тексте которой только слова в наиболее распространенном однозначном смысле, без многозначных слов. Ввод Бога в Конституцию делает граждан рабами божьими – у рабов нет прав значит Конституция силы не имеет.
3. функция гласности. Гражданское общество имеет право знать обо всех законных возможностях или угрозах для гражданского общества. Главная угроза гражданскому обществу это государство.
4. функция защиты гражданского общества от посягательства государства против права человека на СТОПРОЦЕНТНОЕ профессиональное самообразование. Вопрос профессионального соответствия человека на рабочее место решает работодатель по принципу Суда. Работодатель обвиняет претендента на рабочее место в профессиональном несоответствии. Претендент в собеседовании доказывает обратное. Государство не имеет права вмешиваться в этот процесс без обращения к государству одной из сторон.
5. функция защиты гражданского общества от стремления государства разными предлогами заменить принцип «презумпции невиновности» принципом «презумпции виновности».
6. функция разделения законодательной, судебной, исполнительной власти.
7. функция разделения государственной и экономической власти – госпредприятия незаконны за исключением госбанка, торговли оружием. Госпредприятия – попытка класса силовиков захватить одновременно госвласть и экономическую власть за деньги налогоплательщиков. Силовики могут заниматься предпринимательством только в нерабочее время в частном порядке с управляющим, без злоупотребления госвластью.
8. функция экономического равноправия всех классов общества.
9. функция защиты гражданского общества от стремления государства законами незаметно уравнять с госсобственностью общественную и частную собственность, что есть нападение государства на право частной собственности – главный механизм защиты гражданского общества от грабежа государства. Право частной собственности – право собственности за владение, пользование и распоряжение которой собственник не обязан платить налоги, принудительные страховые взносы. Надо платить – это не частная собственность, а скрытая разновидность государственной собственности. Налог (пошлина) на защиту права интеллектуальной собственности изобретателей отнял у них профессию, частную собственность.
10. функция защиты гражданского общества от тайного объединения государства и корпораций против интересов гражданского общества через ограничение уровня и качества жизни граждан экологическими, медицинскими, религиозными и другими законами с целью выжимания с гражданского общества максимума сверхприбылей корпораций, сверхналогов с сверхприбылей.
11. функция защиты гражданского общества от действий корпораций против конкуренции на рынке государства. Государство должно защищать равноправную конкуренцию на рынке. Антимонопольная функция государства – преступление против предпринимательства, гражданского общества. Равноправная конкуренция и монополия – юридически разные понятия. Конкуренцию защищают господдержкой немонополистов, а не нападением государства на монополистов. У предпринимателей есть право на монополию на рынке при условии равноправной конкуренции. Антимонопольная служба должна быть заменена Службой равноправной рыночной конкуренции.
12. функция защиты граждан, их семей от госидеологии. Запрет госидеологии. У граждан нет обязанности выполнять госидеологию.
13. функция защиты гражданского общества от несоразмерного наказания государством за преступления граждан, предприятий.
14. функция защиты гражданского общества от стремления государства натравливать одни классы общества против других (на предпринимателей, на интеллигенцию...).
Выборность власти не обязательно признак демократии – уровень демократии измеряют по уровню выполнения функций демократии. Привязка демократии к выборности власти это обычно манипуляция общественным сознанием в классовых интересах класса силовиков.
КОНСТИТУЦИЯ – государственный юридический документ защищающий гражданское общество от грабежа и идеологического бандитизма государства, как аппарата насилия в лице класса силовиков. Конституция это сокращенная версия Гражданского договора о государстве.
В Конституции светского государства не могут употребляться религиозные идолы (Бог или пророк религии). Иначе это Конституция несветского государства с религиозной госидеологией.
В тексте Конституции допустимы только слова в наиболее распространенном смысле, без многозначных слов непригодных для свободного использования юридической логики. Иначе это документ политического манипулирования гражданским обществом в пользу скрытых антиобщественных интересов класса силовиков.
ЛИБЕРАЛИЗМ – это философия защиты прав гражданина, семьи, предпринимателя от грабежа или идеологического бандитизма государства, корпораций и других агрессивных организаций. Либерализм против национализации государством детей: до совершенолетия дети принадлежат семье в лице родителей.
Либерализм за минимальное вмешательство государства в профессиональную деятельность граждан-предпринимателей. Либерализм стремится к оптимальному балансу между правами и обязанностями граждан-предпринимателей, при котором они наиболее конкурентоспособны на мировом рынке, имеют с него больше выгоды.
Минимальное вмешательство государства в экономику не идея либерализма, если это вмешательство защищает отечественных предпринимателей от иностранных, что соответствует цели либерализма. Либерализму нужен оптимальный баланс между открытостью внутреннего и зарубежных рынков для максимума выгоды граждан-предпринимателей.
Класс силовиков пытается представить либерализм философией космополитов, чтобы качать права силовиков против граждан. Смысл слова либерализм определяют интересы гражданского общества, а не отдельного класса общества. Смысл слова либерализм с точки зрения класса силовиков в основе противоположен смыслу слова либерализм с точки зрения гражданского общества. Либерализм основан на приоритете прав гражданина и семьи над правами организаций.
Либерализм не имеет прямого отношения к госструктурам, международным структурам. Если о либерализме говорят как о идеологии, это не либерализм, а синтезированное понятие созданное классом силовиков в своих классовых интересах и не имеющее прямого отношения к либерализму как философии отражающей интересы гражданского общества. Пример: «либерализм западный», либерализм какой-то страны или международной структуры.
Либерализм не является постоянной госидеологией – он противоречит классовым интересам класса силовиков. Государство – аппарат насилия в лице класса силовиков. Для борьбы с либерализмом класс силовиков агентурой создает «общественные» движения и организации с целью дискредитации, постепенной ликвидации либерализма.
Либерализм используют силовики как средство идеологической борьбы против других стран с целью их расчленения как антинародных диктатур.
ЛИБЕРАЛ – человек придерживающийся принципа: политическая основа государства это принцип защиты гражданина, семьи и предпринимателя от грабежа или идеологического бандитизма государства, корпораций и других агрессивных организаций.
ОБЩЕСТВЕННОЕ ДВИЖЕНИЕ – начальная стадия развития организации.
ЭКСПЛУАТАЦИЯ ЧЕЛОВЕКА ЧЕЛОВЕКОМ – это отношения «начальник – подчиненный» – главный механизм работы любого государства, всех его институтов. Если эксплуатацию человека человеком убрать, государство мгновенно рухнет. Запрет эксплуатации человека человеком для частных предприятий в СССР привел к экономическому краху и распаду государства.
МАРКСИЗМ – это изложенная в научной форме рабовладельческая экономическая программа коммуниста Иисуса Христа вместе с христианским принципом изначальной с рождения виновности человека. Марксизм – это преступная террористическая идеология, убившая сотни миллионов человек в разных странах. Марксизм вернул в страны рабовладельческий строй.
ДЕНЬГИ – это документ свидетельствующий – общество должно Х часов труда среднестатистического рабочего этому человеку (организации) за принесенную им пользу обществу. Деньги – количественная мера обязанности общества человеку (организации).
Деньги главное изобретение человечества, давшее людям возможность работать в полную силу. До появления денег людей людей интересовало только как съесть побольше, работать поменьше, получать всё даром.
Деньги покончили с рабовладельческим общественным строем. Попытка убрать роль денег для возврата в рабовладельческий общественный строй называется Коммунизмом.
ГОСФЕОДАЛ – это носитель наследственного права госвласти, охраняющий госсобственность на всё в стране и экономическую монополию государства (Коммунизм). Госфеодалы это результат обеднения феодалов от быстрого размножения. Наследникам не хватало или не доставалось наследство. Они вынуждены были устраиваться на госслужбу в силовых структурах государства, становясь дворянами.
Дворяне как их родители феодалы хотели паразитировать на гражданском обществе. Желание дворян паразитировать привело их к идее госфеодализма – коммунистического государства которым правят дворяне в статусе госфеодалов. Экономическая монополия государства защищает дворян от экономической конкуренции эксплуатируемого народа.
Первоисточник идеи государства госфеодалов (Коммунизм) – созданный еврооккупантами в Азии учебник рабовладельцев Евангелие, основанный на натравливании рабовладельцами общества против личного и семейного капитала рабов для экономической, идеологической диктатуры класса рабовладельцев.
Феодал – самая либеральная форма рабовладельца. Феодализм – самая либеральная форма рабовладельческого государства. Госфеодализм – экономически нежизнеспособная феодальная форма государства, ведущая его к экономическому краху как в СССР.
Все коммунистические революции устраивают только дворяне. В Франции, Венгрии, Германии, России дворяне устроили коммунистическую революцию чтобы стать госфеодалами.
КОММУНИЗМ – это мечта класса силовиков – государство без денег и частной собственности. Коммунизм – это рабовладельческий строй по Новому завету Библии, состоящий из рабовладельцев, рабов и надзирателей над рабами. Надзиратель выполняет функции принуждения, управления, учета, контроля, распределения. Надзиратель в 2-5 раз дороже раба. Рабовладелец экономя деньги прикрепляет к надзирателю максимум рабов через коллективизацию труда, укрупнение предприятий.
При коммунизме класс рабовладельцев – это правящие кланы класса силовиков. Под предлогом заботы государства об гражданах вся собственность, все предприятия в стране по монопольному праву распоряжения собственностью принадлежат государству, как аппарату насилия в лице класса силовиков. Гражданам-рабам внушают: собственность класса силовиков – общенародная собственность (общая собственность рабов).
Коммунистическое государство – это рабовладельческое государство с государственной формой рабовладения.
От Социализма Коммунизм отличает:
1. при Социализме не вся собственность в стране принадлежит государству. При коммунизме в стране вся собственность принадлежит государству, как в тюрьмах.
2. при Социализме часть экономики основана на деньгах, другая часть на очереди на блага. При Коммунизме деньги запрещены, экономика основана на очереди на блага. Блага выдает чиновник за идеологически правильное поведение.
Коммунизм – коллективизация средств производства, собственности, ответственности, профобразования, профконкуренции, человеческой мысли, бизнеса, жилья, земли с целью не дать одним гражданам-рабам профессионально возвыситься над другими гражданами-рабами – христианская борьба с гордыней. Гордыня – стремление человека к признанию обществом его профессиональных заслуг.
Борьбу с гордыней силовики обосновывают социальным равенством, защитой общества от его врагов – предпринимателей (капиталисты, буржуи), единоличников, интеллигенции.
Коммунизм это борьба класса силовиков с капиталом граждан, с гражданами стремящихся к профессиональному превосходству над людьми через официальный отказ государства от денег для обоснования перехода к распределению материальных и нематериальных благ чиновниками по принципу очереди граждан на блага и борьбы с капиталистическим обществом потребления (ограничение потребления снижением уровня жизни рабов).
Принцип очереди на блага: граждане-рабы стоят в очереди на блага (квартира, холодильник, унитаз...) к госчиновнику-рабовладельцу. (синее удалило государство)
Большая часть граждан-рабов лишена большей части благ под предлогом борьбы государства за коммунистическое сознание (спасение души раба божьего по учебнику европейских рабовладельцев Евангелие) человека через борьбу государства с еретиками (единоличники, предприниматели, интеллигенция...). Налоги – официально без денег через тайное распределение созданной стоимости по принципу очереди на блага.
Первоисточник Коммунизма – созданный еврооккупантами в Азии учебник рабовладельцев Евангелие, основанный на натравливании рабовладельцами общества против личного и семейного капитала рабов для экономической, идеологической диктатуры рабовладельцев.
Евангелие создан еврооккупантами для экономического геноцида народов Азии, Африки.
Личный, семейный капитал как угрозу диктатуре рабовладельцев уничтожают налогами. Рабовладельческий принцип социального равенства запрещает рабам частную собственность, предпринимательство, эксплуатацию человека.
Идея быть классом рабовладельцев чтобы все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебника рабовладельцев Библии, обрекая гражданское общество на экономическое, политическое вырождение.
КОММУНИСТ – это человек который против денег как меры обязанности общества человеку за принесенную им пользу обществу. Коммунистами становятся чаще силовики и профессионально-генетический мусор.
Силовикам коммунистическая идеология интересна как экономическая диктатура класса силовиков, известная как рабовладельческое государство с государственной формой рабовладения (коммунистическое государство).
Профессионально-генетическому мусору коммунистическая идеология выгодна для паразитирования на гражданском обществе.
Первоисточник идеологии коммунистов – учебник рабовладельцев Евангелие, созданный еврооккупантами для экономического геноцида народов Азии, Африки.
СОЦИАЛИЗМ – рабовладельческий строй по принципам Нового завета Библии, состоящий из рабовладельцев, рабов, надзирателей над рабами. Надзиратель выполняет функции принуждения, управления, учета, контроля, распределения. Надзиратель в 2-5 раз дороже раба. Рабовладелец экономя деньги прикрепляет к надзирателю максимум рабов через коллективизацию труда, укрупнение предприятий.
При социализме класс рабовладельцев – это правящие кланы класса силовиков. Под предлогом заботы государства об гражданах большая часть собственности в стране принадлежат государству, как аппарату насилия в лице класса силовиков. Гражданам-рабам внушают: собственность класса силовиков – общенародная собственность (общая собственность рабов).
От Коммунизма Социализм отличает:
1. при Социализме не вся собственность в стране принадлежит государству. При коммунизме в стране вся собственность принадлежит государству, как в тюрьмах.
2. при Социализме часть экономики основана на деньгах, другая часть на очереди на блага. При Коммунизме деньги запрещены, экономика основана на очереди на блага. Блага выдает чиновник за идеологически правильное поведение.
Социализм – это коллективизация средств производства, собственности, ответственности, профобразования, профконкуренции, человеческой мысли, бизнеса, жилья, земли с целью не дать одним гражданам-рабам профессионально возвыситься над другими гражданами-рабами – христианская борьба с гордыней. Гордыня – стремление человека к признанию обществом его профессиональных заслуг.
Борьбу с гордыней силовики обосновывают социальным равенством, защитой общества от его врагов – предпринимателей (капиталисты, буржуи), единоличников, интеллигенции.
Социализм это борьба класса силовиков с капиталом граждан, с гражданами стремящихся к профессиональному превосходству над людьми через распределение материальных и нематериальных благ чиновниками по принципу очереди граждан на блага и борьбы с капиталистическим обществом потребления (ограничение потребления уменьшением зарплат).
Принцип очереди на блага: граждане-рабы стоят в очереди на блага (квартира, холодильник, унитаз...) к госчиновнику-рабовладельцу. (синее удалила Россия)
Большая часть граждан-рабов лишена большей части благ под предлогом борьбы государства за социалистическое сознание (спасение души раба божьего по учебнику европейских рабовладельцев Евангелие) человека через борьбу государства с еретиками (единоличники, предприниматели, интеллигенция...). Часть налогов взимают тайным распределением созданной стоимости по принципу очереди на блага.
Первоисточник Социализма – созданный еврооккупантами в Азии учебник рабовладельцев Евангелие, основанный на натравливании рабовладельцами общества против личного и семейного капитала рабов для экономической, идеологической диктатуры рабовладельцев.
Новый завет Библии создан еврооккупантами для экономического геноцида народов Азии, Африки.
Личный, семейный капитал как угрозу диктатуре рабовладельцев уничтожают налогами. Рабовладельческий принцип социального равенства запрещает рабам частную собственность, предпринимательство, эксплуатацию человека.
Идея быть классом рабовладельцев чтобы все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебника рабовладельцев Библии, обрекая гражданское общество на экономическое, политическое вырождение.
КАПИТАЛИЗМ – экономическая система в которой не менее 50% валового национального продукта создают частные предприниматели (капиталисты) эксплуатирующие свободный труд свободных людей. Свободный труд – это труд не по принуждению как у рабовладельца, феодала или администрации тюрьмы (тюремный бизнес США). Свободные люди – люди имеющие юридическую защиту от посягательства на их право частной собственности, право предпринимательства.
В Каменном веке частные предприниматели могли использовать свободный труд, но их роль в ВНП племени была намного меньше 50%, их право частной собственности или право предпринимательства не имело юридической защиты.
В рабовладельческом, феодальном обществе свободный труд свободных людей, редко встречавшийся в городах, создавал намного меньше 50% ВНП государства.
Момент рождения капитализма в государстве – момент когда частные предприниматели эксплуатирующие свободный труд свободных людей, создали более 50% ВНП.
Так как при равных условиях капиталист вносил финансовый вклад (налоги) в госбюджет больше рабовладельца или феодала, государство как заинтересованная сторона постепенно меняло юридическую и политическую систему государства в пользу капиталистов. Этот процесс эволюции государства остановить может только классовая госидеология (идеологическое государство).
Капитализм современный – экономический индивидуализм, экономическая система государства основанная:
1. на праве человека на предпринимательство
2. на частной собственности на средства производства, землю, интеллектуальную собственность.
3. на распределении товаров, услуг бесплатным механизмом рынка, а не оплачиваемыми налогоплательщиками госструктурами или госзаказами и законами, пролоббированными корпорациями
4. на всеобщем юридическом равноправии
5. на свободе предпринимательства
6. на праве коммерческой тайны (ограничено законами)
7. на свободном найме работников
8. на труде не по принуждению
9. на праве на профсоюз для защиты прав работников.
Госконтроль современного капитализма это:
1. госстандарты
2. сертификация товара, услуги
3. лицензии
4. патенты
5. субсидии
6. кредиты
7. госзаказы
Капитализм – система производства товаров, услуг, управляемая собственниками средств производства (движение капитала) и законами государства регулирующими рынок, найм работников. Капитал – стоимость средств производства + стоимость земли под предприятием (стоимость аренды) + деньги вложенные в найм работников предприятия. Порядок убывания приоритетов у большинства капиталистов (предпринимателей):
1. законы
2. прибыль
3. связи с капиталистами, госчиновниками, политиками
Капитализм не форма общественного строя в полном смысле слова. Форма общественного строя – экономическая система государства + система распределения доходов экономической системы государства + юридическая система. По законам и распределению доходов экономической системы государства капитализм имеет любые промежуточные значения между социально-ориентированным капитализмом и социально-неориентированным капитализмом. Капитализм к социальной ориентации (базовый основной доход) двигает необходимость в покупателях товаров и услуг, в движении капитала. Без них капитализм не функционирует.
Капитализм – это баланс и борьба противоположностей: стремление частных предпринимателей (владельцы предприятий) к ограничению коллективизации капитала (средств производства) сталкивается с стремлением менеджеров и силовиков к коллективизации капитала с целью монополизации мирового рынка (империализм). Менеджеры с этого имеют ограничение вмешательства в их работу владельцев предприятия и монопольную сверхприбыль корпораций, а силовики налоги с сверхприбыли.
Свободе предпринимательства через законодательное лобби противодействуют (изменения законов, условий заключения госконтракта, условий размещения рекламы, коррупция…) менеджеры крупных корпораций с поддержкой класса силовиков, которого привлекают сверхналоги от сверхприбылей монополистических корпораций. Противодействие монополизации бизнеса класс силовиков блокирует ростом госдолга.
Монополизация бизнеса двигает экономику к монополистическому капитализму, характеризующегося переходом экономической власти от производителей товаров и услуг к финансовому капиталу. Финансовый капитал сращиваясь (браки представителей финансового капитала и правящих кланов силовиков) с госвластью, внедряя законами принудительное страхование, перераспределяет экономическую власть в пользу финансового капитала. Монополизация бизнеса заменяет рынок на распределение товаров, услуг финансовыми олигархами (территориальные монополии, лоббируемые законы, коррупционный выбор подрядчиков), силовиками (госзаказы, субсидии, лицензии, условия получения патента).
Научно-технический прогресс заменил феодальный общественный строй капитализмом. Промышленные технологии, разделение труда заменили много среднеквалифицированного труда малым количеством более квалифицированного труда. Борьба с трудом способами, средствами уменьшения труда создала капитализм. Превышение предложения труда над спросом вынудило государства дать гражданам право свободы предпринимательства для экономии средств соцобеспечения граждан. Этот процесс ускорила промышленная революция Англии 19 века сделав рабовладельческий строй США экономически невыгодным.
Промышленные технологии, разделение труда, научные технологии сельского хозяйства внедрили капитализм в всем мире, вызвав взрывообразный рост населения планеты. Акции, деньги (эквивалент среднестатистических человеко-часов труда) позволили капиталистам создать транснациональные корпорации. Корпоративные лобби в законодательной власти государств, борьба транснациональных корпораций за экономический раздел мира привели к двум Мировым войнам.
Применение транснациональными корпорациями международного террора, локальных войн для экономического раздела мира, вынуждает идеологов неправящих партий задумываться об ограничении роста власти транснациональных корпораций деколлективизацией собственности налогом на число акционеров и распространении данного налога в мировом рынке.
КАПИТАЛИСТ – предприниматель или владелец контрольного пакета акций предприятия. Признаки капиталиста:
1. право распоряжения собственностью
2. право собственности как минимум на контрольный пакет акций предприятия
Если предприятием владеет семья – капиталистом является член семьи распоряжающийся основной частью собственности предприятия. Словосочетание «семья капиталистов» неверно по смыслу – не все члены семьи имеют признаки капиталиста.
Не является капиталистом менеджер без собственности на контрольный пакет акций предприятия.
Капиталист не имеет госвласти.
ЕДИНОЛИЧНИК – тип человека стремящегося к личной или семейной частной собственности на средства производства, жилье и землю под ними. Склонен к созданию собственного предприятия для законной финансовой независимости от государства.
ЭРГОНОМИКА ДЛЯ ПРОФЕССИОНАЛОВ – конструирование по принципу: минимальный труд профессионального пользователя.
ЭРГОНОМИКА ДЛЯ НЕПРОФЕССИОНАЛОВ – конструирование по принципу: минимальный труд непрофессионального пользователя.
КОСМОНАВТИКА – отрасли инженерии и науки ставящие своей конечной целью безопасное расселение человека по всей Галактике.
МАШИНА – материально-информационная структура из датчиков, системы управления (средство обработки сигналов от датчиков и выдачи команд на рабочие органы), рабочих органов, трансмиссии, движителей (механизмы передачи силы окружающей среде).
СТАНОК – это оборудование для механической обработки заготовок деталей. От автоматической линии станок отличает:
1. все операции обработки заготовки используют основной привод инструмента.
2. заготовка фиксируется или перемещается только одним зажимом или на одной базовой поверхности
По приводу станки делят:
1. гидравлические станки
2. станки с пневмоприводом
3. электромеханические станки
АВТОМАТ (система управления) – устройство самостоятельно выполняющее сложный алгоритм без компьютера. Примеры: автомат стабилизации ракеты, автомат перекоса в вертолете, автомат повторного включения в электротехнике...
ЭКЗОСКЕЛЕТ – робот с следящим приводом, управляемый человеком внутри робота. Человек управляет экзоскелетом:
1. пропорциональными датчики датчиками силы (момента, давления). Человек жмет датчики силы рук, ног: датчики включая привод убегают от человека двигая руками, ногами экзоскелета. Используют пропорциональные (плавно меняют выходной сигнал пропорционально входному действию) датчики короткого (для уменьшения задержки управления экзоскелетом) хода (тензодатчики). Для быстродействия приводов экзоскелет может иметь систему пружин. В системе защиты экзоскелета от падения могут быть пружины. Датчики угла (перемещения) не нужны.
2. миодатчиками: слабые биотоки (0,1В на коже; задержка прихода сигнала от мозга 0,1сек) мышц на коже рук, ног электроусилителями (включают приводы) двигают экзоскелет.
3. по проводам через управляющие экзоскелеты рук, ног: экзоскелет электродистанционный.
4. через нейроинтерфейс. Напряжение сигнала от мозга 0,01В.
Экзоскелеты управляемые датчиками силы (момента, давления) делят на:
1. однодатчиковые экзоскелеты: привод держит постоянной силу датчика-1 силы руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина.
2. двухдатчиковые экзоскелеты: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод.
Скорость привода экзоскелета прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
При управлении экзоскелетом через отдельные управляющие экзоскелеты рук, ног внешняя среда управляет человеком, если его сила в установленном масштабе (от линейки резисторов, конденсаторов, колебательных контуров или графика в софте) меньше сил приводов экзоскелета. Это силовая обратная связь: можно сделать как копирующий манипулятор без сложной электроники, без компьютера. Силовая обратная связь соединяет части-А-В машины 2 каналами связи + 2 привода + 2 датчика угла (перемещения) + 2 датчика силы (момента, давления). Канал-1 разностью углов (перемещений) датчиков частей-А-В найдет знак перемещения привода. По знаку канал-2 уравняет цифры датчиков углов, сил двигая приводом часть машины где меньше сила.
Без датчиков силы силовая обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний; сила захвата, прижима резко колеблется 0-100% при совпадении углов. При требовании малой задержки управления электродистанционная силовая обратная связь передает не 2, а 4 канала: угол (перемещение) + угловая скорость (скорость перемещения) + сила (момент, давление) + скорость изменения силы (скорость изменения момента, давления). Силовую обратную связь называют электродистанционной системой управления: силу (момент, давление), угол (перемещение) передает только линия связи без прямой механической связи. Функции: ограничения, калибровка, самодиагностика, тесты, отключение неисправного канала дублирования…
1-й в мире экзоскелет: Hardiman от General Electric, 1965г. На идею: человек в костюме с копирующими манипуляторами вешает на самолет бомбы, ракеты, навело серийное производство 1944г электродистанционных копирующих манипуляторов: стрелок бомбардировщика B-29 по проводам дистанционно наводил на цель пулемёты. 1960г: идею инженеры General Electric воплощали в 1-ом в мире экзоскелете Hardiman (1965г: 18 степеней свободы рук, ног) для авианосцев, подводных работ, атомных электростанций, Космоса. С силой человека 4,5кг рука Hardiman поднимала 110кг (1965г), потом 340кг при весе руки с гидронасосом 680кг. 1971г: проект закрыт: чрезмерны задержки, вибрации приводов, вес экзоскелета.
1-й работоспособный экзоскелет XOS (конструктор Стивен Якобсен) создала (грант DARPA от 2000г) фирма Sarcos: известна робот-динозаврами для съемок фильма «Парк Юрского периода». 2007г: Sarcos + экзоскелет XOS купила корпорация Raytheon.
Приводы японских (HAL-5) экзоскелетов скопированы у андроида Honda Asimo (Asimo прыгает с аккумулятором на 1 ноге): электромотор-маховик постоянного вращения крутит 2 магнитореологические муфты сцепления. Магнитореологическая муфта сцепления-1 включает волновый редуктор-1. Магнитореологическая муфта сцепления-2 включает волновый редуктор-2. Шкив выходного вала редуктор-1 тянет трос сгибателя руки (ноги) экзоскелета. Шкив выходного вала редуктор-2 тянет трос разгибателя руки (ноги) экзоскелета. Муфты работают в постоянной малой противофазе управляемой компьютером для постоянной (автомат стабилизации силы) компенсации упругих деформаций экзоскелета, всех зазоров привода: задержка управления (0,02сек) в разы меньше гидропривода, на 50% экономичнее.
Волновые редукторы (КПД=82 %) шумны, дороги, недолговечны – ожидается переход на дешевый бесшумный долговечный привод «винт – гайка скольжения», который втрое легче волнового редуктора: у гайки нагрузка равномерно распределена на немалую упорную поверхность 3-9 витков резьбы, у волнового редуктора вся многотонная в толчке нагрузка экзоскелета давит на два зуба.
Часть разработчиков считает микротурбины лучшим источником энергии военного, грузоподъемного (замена крана, погрузчика в помещениях с низким потолком), спасательного, пожарного… экзоскелетов. Газотурбинный двигатель 1,7 раз легче, вдвое компактнее поршневого равной мощности, 10 раз быстрее запуск в мороз -40°С, в разы надежнее (цифры с танкостроения. С авиастроения более впечатляют), не дает вибрацию на экзоскелет. КПД газотурбинных двигателей выше КПД дизелей в авиа и судостроении. Подводный экзоскелет: микротурбина может работать на гидрореагирующем (окислитель вода как в торпедах) топливе.
В режиме ожидания (работа сетевой информационной системы с датчиками, приводы бесшумной наводки оружия, кондиционер, отопитель, стартер…) – вспомогательная микротурбина… энергоисточник.
Экзоскелеты быстро доставят снаряды зениток (ракет, зениток) на крышах по лестницам многоэтажных зданий. В городских боях важна способность экзоскелетов нести броню (рикошетные пули, осколки, отраженные ударные волны), тяжелые пулеметы, боезапас.
Реализм ощущений оператора, безопасность окружающим дает малое усиление в работе экзоскелета с небольшим весом. Больше груз – больше усиление. После марш-броска 60км с максимумом усиления солдат в экзоскелете идет в бой неуставшим.
С 2010г в продаже 1-й в мире коммерческий экзоскелет «HAL-5»: работает 2,5ч, вес 23кг, поднимает руками 40кг, ногами 80кг, конструктор Есиюки Санкаи.
«HAL» 1-й в мире бионический экзоскелет: слабые биотоки (0,1-0,7В задержка 0,05сек) мышц на коже рук, ног электроусилителями (включают приводы) двигают экзоскелет. Ожидают экзоскелеты с нейроинтерфейсом: приводы экзоскелета двигают сигналы выходных (для мозга) нервных волокон, выходящих с межпозвоночных отверстий (на уровне плеч, таза) позвоночника. Их снимут бесконтактные (решат проблему отторжения электродов) датчики с усилителями. Инвалиды в седле шагающего экзоскелета получат свободу работы руками, ногами. Сигналы датчиков силы (и тактильные сигналы искусственной кожи протеза кисти в экзоскелете) экзоскелета компьютер переведет в биоформат импульсов мозга инвалида. В компьютере информация о биоформате (тесты генератором импульсов) сигнала каждого нервного волокна, идущего в мозг. Сигналы датчиков экзоскелета в биоформате компьютер направит в нервные волокна рук, ног, входящие в межпозвоночные отверстия (на уровне плеч, таза) позвоночника. Передача сигнала в входные нервные волокна бесконтактно (индуктивная или емкостная наводка параллельным электродом серии СВЧ-импульсов симулирует каждый одиночный импульс в нервном волокне)(крутой передний фронт и пологий задний фронт СВЧ-импульсов или наоборот), решит проблему отторжения электродов.
Интерфейс «нервные волокна – экзоскелет», подключенный к компьютеру экзоскелета инвалида, обеспечит требуемую физиологией (безопасное пользование экзоскелетом без обучения) человека задержку управления экзоскелетом не > 0,1сек, определяемую средней частотой (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков удлинения и силы мышц человека 10Гц.
ЗАО «Экзороботикс» создало экзоскелет инвалида ExoAtlet без обратной связи приводов с миодатчиками на коже человека или силовой обратной связи экзоскелетов работающих рук инвалида с ногами экзоскелета. Только ручное переключение софта без прямого управления шагами человеком в реальном времени.
Экзоскелет инвалида с НИИ «Институт живых систем» Нижегородского государственного университета им. Н. И. Лобачевского: разработчики планируют создать управление сигналами (углы, угловая скорость, векторы, перемещения) гироскопа на спине: наклон туловища вперед увеличит длину шага; наклон вбок переместит центр масс вбок от точек опоры ступней; поворот туловища от вертикали управляет фазой, ускорением, длиной шага.
ОАО «ЦНИИТОЧМАШ» представил экзоскелет наводки стрелкового оружия.
Экзоскелеты разрабатывают: Япония, Корея, США, Франция, Израиль, Россия, Китай.
Экзоскелет возможно интегрировать в скафандр: работа космонавтов на планетах высокой гравитации: без приводов экзоскелета человек физически не тянет вес тела, скафандра, системы жизнеобеспечения, радиационной защиты. Смертельную дозу радиации в скафандре космонавт наберет от космических лучей за 200ч, от солнечной бури за минуты. Экзоскелет можно защитить от космических лучей, солнечных бурь, от нейтронов, от рентгеновского и гамма излучений термоядерных взрывов так, как защищают от радиации близких атомных взрывов борткомпьютеры ядерных ракет: покрытие сплава изотопов металлов гадолиний-157Gd, эрбий-167Er.
В скафандре расход энергии человеком (КПД=25%) 4 раза больше при 10-кратном уменьшении скорости работы. Экзоскелет в скафандре в 4 раза снизит расход энергии космонавтом, в 10 раз (с экзоперчаткой) увеличит скорость работы.
Энергию приводов экзоскелет-скафандра обеспечит по электрический, оптический (100кВт по 1кв/мм оптоволокна) кабель или аккумулятор солнечных батарей. Мобильная версия: аккумулятор, топливный элемент, жидкое топливо. Проблемы интеграции экзоскелета с скафандром, защиты от опасной внешней среды, управления огромными (меха) экзоскелетами решит экзоскелет электродистанционный (электродистанционный интерфейс): в нём прямая механическая передача силы, угла, момента на руки, ноги экзоскелета заменена передачей по проводам, по оптоволокну (по радио, по оптическому, инфракрасному, ультрафиолетовому, рентгеновскому, терагерцовому каналу, по гамма-лучам, по гиперзвуковому каналу через стенку, по нейтронному, по нейтринному, по мюонному каналу, по протонному или ионному каналу в вакууме…).
В герметичном отсеке экзоскелета электродистанционного экзоскелеты рук, ног человека соединены с экзоскелетом разъемом: хватит 2 провода на обратную связь, энергоподачу. Нет механических уплотнений движущихся деталей, нет гермосоединений трубопроводов. Космонавт, водолаз входит в гермоотсек, сервопривод герметизирует двери шлюза, экзоскелета, электрозамками отсоединит экзоскелет от шлюза, работает в экзоскелете в шлеме кругового обзора. После работы стыковка в обратном порядке.
Гермоотсек экзоскелета электродистанционного защитит космонавта от вакуума, от плотных горячих атмосфер планет типа Венеры; от давления жидкой среды типа океана (фары, погружение сквозь лед с горячим радиоизотопным или атомным реактором внизу на трос-кабеле) Европы (спутник Юпитера); пожарного, спасателя от горячей, ядовитой внешней среды горящих химических, атомных предприятий; водолаза от давления неограниченных глубин океана; солдата от отравляющих газов, радиоактивной внешней среды…
Экзоскелет электродистанционный с гермоотсеком (запас кислорода, поглотитель углекислоты) даст шахтерам шанс выжить в взрыве метана, обвале. Ожидают превышения оборота рынка экзоскелетов электродистанционных над суммарным рынком остальных видов мобильных экзоскелетов из-за их ограничений функциональности.
Экзоскелет как средство телеуправления андроидом (патент 2134193RU А.Стрельцов 1997г) рассматривают госпрограммы освоения дна океана принятые в Японии, России. На дне 5,6км Тихого океана Япония найдя месторождения редкоземельных металлов в 1000 раз больше разведанных мировых запасов, приняла госпрограмму освоения ресурсов морского дна: редкоземельные металлы, гидрат метана, нефть, газ… Арктика это 30% мировых запасов нефти, газа: в Карском море 13млрд т нефти.
Домашний экзоскелет как средство телеуправления андроидом (костюм телеприсутствия) по криптозащищенной интернет-линии, позволит рабочим, инженерам из дома работать аватаром-андроидом подводных городов Северного ледовитого океана. Андроид подводного предприятия работает 24ч в сутки. Передача управления с костюма-1 телеприсутствия (оператор-1) к костюму-2 телеприсутствия (оператор-2): оператор-2 примет работу в режиме односторонней (от андроида) обратной связи. Костюм-1 телеприсутствия (оператор-1): усиление в направлении «оператор – андроид» плавно уменьшится (сигнализация + процентное усиление на экране) до нуля, в костюме-2 телеприсутствия (оператор-2) плавно растет (сигнализация + процентное усиление на экране) до 100%.
Экзоскелет как средство телеуправления андроидом применим как костюм виртуальной реальности. Рыночный потенциал домашнего экзоскелета (в 3D-кардане с приводами + датчик угла в каждой оси + датчик угла наклона на спине) как костюма виртуальной реальности многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор), рекламных сайтов в 10000 раз превысит рыночный потенциал экзоскелета как транспортного, грузоподъемного средства. Мировой рыночный потенциал домашнего экзоскелета как костюма виртуальной реальности, как средства управления аватаром виртуальной реальности многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор), рекламных сайтов обещает превысить мировой рыночный потенциал автомобиля (60% мировой промышленности: подрядчики, субподрядчики).
Сложные части экзоскелета как средства телеуправления андроидом – приводы, экзоперчатка с силовой обратной связью с кистью руки экзоскелета или с кистью руки андроида. Эту технологию демонстрировала фирма Festo, 2012г: человек экзоперчаткой силовой обратной связью по проводам управлял кистью руки робота. Экзоперчатка НПО «Андроидная Техника» может управлять кистью андроида силовой обратной связью по радио или встречными модулированными лазерными лучами.
Главная проблема разработчиков экзоскелетов – задержка управления (время отклика) приводом решена в андроиде Хонда Азимо: маховик (ротор электромотора на постоянных максимальных оборотах) + магнитореологическая муфта сцепления + редуктор. Магнитореологическая муфта сцепления андроида Азимо соединяет маховик с редуктором за 0,02сек, что соответствует техническим условиям безопасного управления экзоскелетом, определяемыми физиологией человека. Требуемую физиологией (безопасное пользование без обучения) человека задержку управления экзоскелетом не > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Гц.
Для реверсивных машин (экзоскелет) задержка управления это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов машины.
ЭКЗОСКЕЛЕТ ЭЛЕКТРОДИСТАНЦИОННЫЙ – экзоскелет с электродистанционным (копирующая отрицательная обратная связь по проводам, по оптоволокну, по радио, по оптическому, инфракрасному, ультрафиолетовому, рентгеновскому, терагерцовому каналу, по гамма-лучам, по гиперзвуковому каналу через стенку, по нейтронному, по нейтринному, по мюонному каналу, по протонному или ионному каналу в вакууме…) интерфейсом: управление без прямой механической связи человека с руками, ногами экзоскелета. Человек механически управляет только управляющими экзоскелетами своих рук, ног, шарнирно соединенных с внешним каркасом. Экзоскелеты рук, ног по проводам или оптоволокну силовой обратной связью передают углы, силы приводам рук, ног экзоскелета и обратно.
Пропорциональный (датчик плавно меняет выходной сигнал пропорционально входному действию) датчики силы, угла: в экзоскелетах рук, ног человека, в приводах рук, ног экзоскелета. Пропорциональные датчики силы имеют короткий ход (тензодатчики) для уменьшения задержки управления экзоскелетом. Пропорциональный датчик силы: бесконтактный тензодатчик, оптоволоконный датчик, магнитный датчик, электростатический датчик, ультразвуковой датчик…
Человек жмет пропорциональные датчики силы (момента, давления) экзоскелета руки (ноги): датчики включая привод убегают от человека, по электропроводам двигая приводом на такой же угол руку (ногу) экзоскелета. Приводами экзоскелета внешняя среда управляет человеком, если его сила в установленном масштабе (от линейки резисторов, конденсаторов, колебательных контуров или графика в софте) меньше сил приводов экзоскелета. Это силовая обратная связь: можно сделать как копирующий манипулятор без сложной электроники, без компьютера.
Силовая обратная связь соединяет части-А-В машины 2 каналами связи + 2 привода (актуатора) + 2 датчика угла (перемещения) + 2 датчика силы (момента, давления). Канал-1 разностью углов (перемещений) датчиков частей-А-В найдет знак перемещения привода. По знаку канал-2 уравняет цифры датчиков углов, сил двигая приводом часть машины, где меньше сила. Без датчиков силы силовая обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний; сила захвата, прижима резко колеблется 0-100 % при совпадении углов.
Для уменьшения задержки управления силовая обратная связь передает не 2, а 4 канала: угол (перемещение) + угловая скорость (скорость перемещения) + сила (момент, давление) + скорость изменения силы (скорость изменения момента, давления).
Силовую обратную связь называют электродистанционной системой управления. В списке функций: ограничения, калибровка, самодиагностика, тесты, отключение неисправного канала дублирования…
Экзоскелеты управляемые датчиками силы (момента, давления) делят на:
1. однодатчиковые экзоскелеты: привод держит постоянной силу управляющего датчика-1 силы руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина.
2. двухдатчиковые экзоскелеты: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод.
Скорость привода экзоскелета прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
В гермоотсеке экзоскелета электродистанционного экзоскелеты рук, ног человека соединены с исполнительным экзоскелетом разъемом кабеля: хватит 2 провода на обратную связь, энергоподачу. Нет механических уплотнений движущихся деталей, нет гермосоединений трубопроводов. Космонавт, водолаз через шлюз входит в гермоотсек, сервопривод герметизирует двери шлюза, экзоскелета, электрозамки отсоединят экзоскелет от шлюза, работа в экзоскелете в шлеме кругового обзора. Стереокартинку, векторы звуков передают сферический экран шлема, многоканальная акустическая система шлема. После работы стыковка в обратном порядке.
Чтобы не гнать обратной связью 150кадр/сек из-за задержки «наклон головы – смена картинки» шлем закреплен в зажимной раме туловища. Сферический экран шлема максимального (руки пользователя снаружи экрана, чтобы не попали в кадр) диаметра для снижения вероятности головных болей, быстрой утомляемости пользователя от чрезмерного несоответствия (для мозга) расстояния «глаз – объект на экране» реальному расстоянию до этого объекта.
Гермоотсек экзоскелета электродистанционного защитит космонавта от вакуума, от плотных горячих атмосфер планет типа Венеры; от давления жидкой среды типа предполагаемого океана (фары, погружение сквозь лед с горячим радиоизотопным или атомным реактором внизу на длинном трос-кабеле) Европы (спутник Юпитера); пожарного и спасателя от горячей, ядовитой внешней среды горящих химических, атомных предприятий; водолаза от давления неограниченных глубин океана; солдата от отравляющих газов, радиоактивной внешней среды…
Экзоскелет электродистанционный с гермоотсеком (запас кислорода, поглотитель углекислоты) даст шахтеру шанс выжить в взрыве, обвале. В экзоскелете электродистанционном космонавты будут работать на планетах высокой гравитации: без приводов экзоскелета человек физически не тянет (3g) вес тела, скафандра, системы жизнеобеспечения, радиационной защиты. Смертельную дозу радиации в скафандре космонавт наберет от космических лучей за 200ч, от солнечной бури за минуты. Гермоотсек экзоскелета электродистанционного можно защитить от космических лучей, солнечных бурь, от нейтронов, от рентгеновского и гамма излучений термоядерных взрывов так, как защищают от радиации близких атомных взрывов борткомпьютеры ядерных ракет: покрытие сплава изотопов металлов гадолиний-157Gd, эрбий-167Er.
В космическом скафандре расход энергии человеком (его КПД=25%) 4 раза больше при 10-кратном уменьшении скорости работы. Экзоскелет электродистанционный в 4 раза снизит расход энергии космонавтом, в 10 раз (с экзоперчаткой + силовой гироскоп экзоскелета) увеличит скорость работы.
Энергию приводов экзоскелет электродистанционный обеспечат по электрическому или оптокабелю (100кВт по 1кв/мм оптоволокна) или через аккумулятор солнечных батарей.
Часть разработчиков считает микротурбины лучшим энергоисточником военного, грузоподъемного (замена крана, погрузчика в помещениях с низким потолком), спасательного, пожарного… экзоскелетов. Газотурбинный двигатель в 1,7 раз легче, вдвое компактнее поршневого двигателя равной мощности, в 10 раз быстрее запуск в мороз -40°С, в разы надежнее (цифры с танкостроения. Цифры с авиастроения более впечатляют), не дает вибрацию на экзоскелет. КПД газотурбинных двигателей превысил КПД дизелей в авиа и судостроении. В подводных экзоскелетах электродистанционных турбина может работать на гидрореагирующем (окислитель вода как в торпедах) топливе.
В режиме ожидания (работа сетевой информационной системы с датчиками, приводы бесшумной точной наводки оружия, кондиционер, отопитель, стартер…) – вспомогательная микротурбина… энергоисточник.
Электродистанционный интерфейс с 4-кратным дублированием международными стандартами вытеснил другие виды интерфейса в последних поколениях военных, пассажирских самолетов. Электродистанционный интерфейс внедряет автомобилестроение: электронные педали газа, тормоза. Электродистанционный интерфейс экспериментальных экскаваторов позволил оператору чувствовать в работе крупные камни в мягком (влажном) грунте, песке, иле, глине, увеличить производительность, при работе снизить вероятность разрушения городской подземной инфраструктуры, ускорить разрушение экскаватором ветхих зданий.
Реализм ощущений оператора, безопасность окружающим дает малое усиление в работе экзоскелета электродистанционного с небольшим весом. Больше груз – больше усиление: подъем неподъемного человеку груза. Крупные экзоскелеты электродистанционные помогут спасателям в разборах завалов безопасно приподнимать, оттаскивать бетонные плиты, элементы конструкций рухнувших зданий, защищая спасателей от падающих обломков.
Электродистанционный интерфейс экзоскелета снимет ограничения размеров, силы, скорости экзоскелета, повысит безопасность (фильтры ускорений, углов, угловых скоростей, угловых ускорений, сил, скоростей изменения сил; графики усиления обратной связи) работы оператора. Ожидают многократного превышения оборота рынка экзоскелетов электродистанционных над суммарным рынком остальных видов мобильных экзоскелетов из-за их ограничений грузоподьемности, функциональности.
Домашний экзоскелетный электродистанционный интерфейс как средство телеуправления андроидом (костюм телеприсутствия) по криптозащищенной интернет-линии, позволяет рабочим, инженерам не выходя из дома дистанционно работать андроид-аватаром подводного города (разработка природных ресурсов: нефть, газ, редкоземельные металлы…) в многокилометровой глубине Северного ледовитого океана. Андроид подводного предприятия работает без остановки 24ч в сутки. Передача управления с костюма телеприсутствия-1 (оператор-1) к костюму телеприсутствия-2 (оператор-2): оператор-2 примет работу в режиме односторонней (от андроида) обратной связи. Костюм телеприсутствия-1 (оператор-1): усиление в направлении «оператор – андроид» плавно уменьшится (сигнализация + процентное усиление на экране) до нуля, в костюме телеприсутствия-2 (оператор-2) плавно растет (сигнализация + процентное усиление на экране) до 100 %.
Экзоскелетный электродистанционный интерфейс как средство телеуправления андроидом разрабатывает российская фирма «Андроидная техника». Планируют применить как костюм управления аватаром виртуальной реальности. Рыночный потенциал домашнего экзоскелетного электродистанционного интерфейса (в 3D-кардане с отдельным приводом и датчиком угла в каждой оси, с датчиком угла наклона в спине) как костюма виртуальной реальности в многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор) и рекламных сайтах, в ~10000 раз превысит рыночный потенциал экзоскелета как транспортного, грузоподъемного средства. Мировой рыночный потенциал домашнего экзоскелета, как костюма виртуальной реальности, как средства управления аватаром виртуальной реальности многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор) и рекламных сайтов, обещает многократно превзойти мировой рыночный потенциал автомобиля (60% мировой промышленности: подрядчики, субподрядчики).
Сложные части экзоскелета электродистанционного и экзоскелетного электродистанционного интерфейса как средства телеуправления андроидом – это приводы и экзоперчатка с силовой обратной связью с кистью руки экзоскелета или с кистью руки андроида. Эту технологию в 2012г демонстрировала семейная фирма Festo: человек экзоперчаткой силовой обратной связью по проводам управлял кистью руки робота.
Экзоперчатка фирмы «Андроидная Техника» управляет кистью руки андроида силовой обратной связью по радио или встречными модулированными лазерными лучами.
Главная проблема разработчиков экзоскелетов – задержка управления (время отклика) приводом решена в андроиде Хонда Азимо: маховик (ротор электромотора на постоянных максимальных оборотах) + магнитореологическая муфта сцепления + редуктор. Магнитореологическая муфта сцепления андроида Азимо соединяет маховик с редуктором за 0,02сек, что соответствует техническим условиям безопасного управления экзоскелетом, определяемыми физиологией человека. Требуемую физиологией (безопасное пользование без обучения) человека задержку управления экзоскелетом > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Гц.
Для реверсивных машин (экзоскелет) задержка управления это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов машины.
Задержка управления электродистанционным экзоскелетом равна времени задержки приводов управляющего экзоскелета оператора + время задержки отработки движения оператора экзоскелетом.
Общественную потребность в экзоскелете с электродистанционным интерфейсом создало в 1944г серийное производство электродистанционных копирующих манипуляторов: стрелок бомбардировщика B-29 по проводам дистанционно наводил на цель пулеметы. Технология вызвала мысль: человек в костюме с копирующими манипуляторами вешает на самолет бомбы, ракеты.
Экзоскелет электродистанционный иногда называют меха.
КЛАССИФИКАЦИЯ ЭКЗОСКЕЛЕТОВ:
1. инвалидные
2. медицинские (переноска и укладка больных, вынос раненных с поля боя…).
3. военные
4. грузовые
5. спасательные
6. пожарные
7. спортивные…
8. управляющие экзоскелеты
9. экзоскелеты управления аватаром
Экзоскелеты управляемые:
1. через пропорциональные датчики силы (момента, давления). Человек жмет датчики силы рук, ног: датчики включая привод убегают от человека двигая руками, ногами экзоскелета. Используют пропорциональные (плавно меняют выходной сигнал пропорционально входному действию) датчики короткого (для уменьшения задержки управления экзоскелетом) хода (тензодатчики). Для быстродействия приводов экзоскелет может иметь систему пружин. В системе защиты экзоскелета от падения могут быть пружины. Датчики угла (перемещения) не нужны. Только датчики силы (момента, давления): сила привода экзоскелета пропорциональна приложенной человеком силе.
2. через миодатчики: слабые биотоки (0,1В на коже; задержка прихода сигнала от мозга 0,1сек) мышц на коже рук, ног электроусилителями (включают приводы) двигают экзоскелет.
3. по проводам через отдельные управляющие экзоскелеты рук, ног: экзоскелет электродистанционный. Южнокорейская фирма Korea Future Technology построила электродистанционный экзоскелет METHOD-1. Силовая обратная связь соединяет части-А-В машины 2 каналами связи + 2 привода (актуатора) + 2 датчика угла (перемещения) + 2 датчика силы (момента, давления). Канал-1 разностью углов (перемещений) датчиков частей-А-В найдет знак перемещения привода. По знаку канал-2 уравняет цифры датчиков углов, сил двигая приводом часть машины, где меньше сила. Без датчиков силы силовая обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний; сила захвата, прижима резко колеблется 0-100% при совпадении углов. При требовании малой задержки управления силовая обратная связь передает не 2, а 4 канала: угол (перемещение) + угловая скорость (скорость перемещения) + сила (момент, давление) + скорость изменения силы (скорость изменения момента, давления).
4. через нейроинтерфейс. Напряжение сигнала от мозга 0,01В, задержка прихода сигнала от мозга 0,1сек.
По обратной связи:
1. экзоскелеты с прямой механической силовой обратной связью от окружающей среды к человеку.
2. экзоскелеты с чисто информационной (провод, оптоволокно или другие виды связи) силовой обратной связью от окружающей среды к человеку: электродистанционные экзоскелеты.
Экзоскелеты инвалидные:
1. управляемые миодатчиками: слабые биотоки (0,1В на коже; задержка прихода сигнала от мозга 0,1сек) мышц на коже рук, ног электроусилителями (включают приводы) двигают экзоскелет.
2. управляемые датчиками силы (момента, давления).
3. управляемые нейроинтерфейсом.
Экзоскелеты управляемые датчиками силы (момента, давления):
1. однодатчиковые экзоскелеты: привод держит постоянной силу датчика-1 силы руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина.
2. двухдатчиковые экзоскелеты: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод.
Скорость привода экзоскелета прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
По приводу экзоскелеты:
1. с двигателем внутреннего сгорания (микротурбины, поршневые двигатели…)
2. электрические
3. пневматические
4. гидравлические
По типу рабочего органа привода пневматические и гидравлические экзоскелеты делят на:
1. поршневые
2. лопастные
3. турбинные
4. искусственные мышцы из гибких диагонально-армированных трубок, сокращающихся в длине с подачей давления воздуха.
По энергоисточнику:
1. экзоскелеты на жидком топливе
2. экзоскелеты на электрическом аккумуляторе (супермаховик, химический аккумулятор…).
3. экзоскелеты на тепловом (рабочий орган: поршень, турбина…) аккумуляторе.
4. экзоскелеты на жидком газе (азот, углекислота…).
По типу соединения «двигатель – редуктор»:
1. экзоскелеты с прямым (неуправляемым) соединением двигателя с редуктором или рукой, ногой экзоскелета.
2. экзоскелеты с управляемым (регулируемая муфта сцепления, регулируемый амортизатор) соединением двигателя с редуктором или рукой, ногой экзоскелета.
Тип редуктора привода:
1. экзоскелеты с редуктором на зубчатых колесах (волновые и др.)
2. экзоскелеты с редуктором на основе пары «винт – гайка», «винт – шариковая гайка».
3. экзоскелеты с червячным редуктором
4. экзоскелеты с тросовым редуктором
5. экзоскелеты с кулачковым редуктором
Экзоскелеты электродистанционные имеют герметичный отсек, внутрь которого идут только провода, оптоволокно или другая линия связи. Это намного упрощает их применение в агрессивных, опасных средах.
Экзоскелеты электродистанционные:
1. космические. На практике пока не реализованы
2. глубоководные. На практике пока не реализованы
3. военные. На практике пока не реализованы
4. грузовые. На практике пока не реализованы
5. спортивные. На практике пока не реализованы
КОСТЮМ ТЕЛЕПРИСУТСТВИЯ – находящийся в стадии проектирования экзоскелетный интерфейс телеуправления андроидом через тактильно-силовую обратную связь в радиусе 6000км с задержкой управления (связь + её дешифровка + работа приводов) не более 0,1сек. Представляет собой экзоскелет с пропорциональными датчиками сил, углов и приводами рук, ног внутри 3D-кардана (пересечение 3-х осей у пупка пользователя. Патент 2134193RU А.Стрельцов 1997г) + шлем с 3D-видео и 3D-звуком. 3D-кардан с датчиками угла и приводами передает пользователю векторы сил, ускорения, моменты действующие на аватара-андроида в 3 осях местного пространства.
Сферический экран шлема, стереокартинка без очков, векторы звуков передает многоканальная акустическая система шлема. Чтобы не гнать обратной связью 150кадр/сек из-за задержки «наклон головы – смена картинки» шлем закреплен в зажимной раме туловища. Сферический экран шлема предполагается максимально возможного (руки пользователя снаружи экрана чтобы не попали в кадр) диаметра для снижения вероятности головных болей и быстрой утомляемости пользователя от чрезмерного несоответствия (для мозга) расстояния «глаз – объект на экране» реальному расстоянию до этого объекта.
Силовая обратная связь костюма телеприсутствия передает в обе стороны: углы (перемещения) + угловые скорости (скорости перемещения) + силы (моменты) + скорости изменения сил (скорости изменения моментов). При работе через интернет трафик силомоментных каналов костюма телеприсутствия не превышает 10Кб/сек. Трафик видеоканала или (при наличии) тактильного канала полнофункциональной (функции аналогичные техническим параметрам кожи среднестатистического человека) искусственной сенсорной кожи андроида – мегабайты в секунду.
Костюмы телеприсутствия по типу управления аватаром делят на:
1. однодатчиковые костюмы телеприсутствия: привод держит постоянной силу датчика-1 силы экзоскелета руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина.
2. двухдатчиковые костюмы телеприсутствия: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод.
Скорость привода костюма телеприсутствия прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
Костюм телеприсутствия – электродистанционный экзоскелетный интерфейс подвешенный внутри 3D-кардана. Общественную потребность в костюме телеприсутствия создает планируемое освоение природных ресурсов в многокилометровой глубине дна океанов; обслуживание вредных, опасных (химических, радиоактивных…) производств и оказание квалифицированной медпомощи больным в районах опасной эпидемии.
Военное применение костюма телеприсутствия ограничено помехоустойчивостью канала обратной связи с андроидом к создаваемым противником помехам. Проблему помехоустойчивости канала обратной связи планируют решить встречно-направленными узконаправленными лазерными лучами с датчиковым (управление компьютерами направленностью передающих лазеров и приемных датчиков луча) и инерциально-гироскопическим взаимным самонаведением лучей. Планируют обратную связь рентгеновскими, ультрафиолетовыми, инфракрасными и терагерцовыми лучами.
Борьба с помехами противника предполагает гонку мощностей лучей обратной связи на полях сражений. Чувствительность приемных каналов обратной связи компьютер андроида по калибровочному сигналу установит обратно пропорционально мощности лучей на приемнике для отсечения помех противника. На расстоянии до 2км в условиях гонки мощностей лучей равными противниками непрерывно полностью блокировать все частоты электромагнитных волн в время войны нереально, учитывая псевдослучайный перескок частоты передатчика, приемника.
Вмешательство хакера маловероятно: диалоговый пароль + динамическая шифровка канала + добавление в канал сигнала генератора случайных чисел + неизвестный алгоритм сжатия канала + учет истории ракурса прихода сигнала приемника.
От электромагнитных бомб компьютер робота можно защитить высоковольтными (500В. Полупроводниковые контролеры с рабочим напряжением 500В для управления электромоторами на 500В есть в продаже) микропроцессорами + многослойная активная (электростатическая + электромагнитная) экранировка + замена всех проводов заземленными коаксиальными кабелями или оптоволокном (оптоволокно с сечением 1кв.мм передает мощность 100кВт)…
Вариант: управление андроидом по многокилометровому закрученному или коаксиальному (защита от помех) кабелю (цифровой сигнал на высоковольтной СВЧ-несущей частоте) или оптоволокну, сматывающегося с катушки (на спине андроида), аналогично проводной системе управления современных противотанковых управляемых ракет.
Для защиты андроида от применяемых противником сверхярких импульсных источников излучений андроид наделят элементами искусственного интеллекта. При потере управления военный андроид сохранит вектор, скорость перемещения, другие действия по таймерным, программным установкам оператора.
Разными фирмами мира изготовлены все составные материальные элементы костюма телеприсутствия, созданы протоколы передачи информации силовой обратной связи с копирующими манипуляторами. Главная проблема – задержка управления аватаром-андроидом в 21 веке решена в конструкции привода андроида Хонда Азимо: маховик (ротор электромотора на постоянных максимальных оборотах) + магнитореологическая муфта сцепления + редуктор. Магнитореологическая муфта сцепления андроида Азимо соединяет маховик с редуктором за 0,02сек, что соответствует техусловиям (физиология) обратной связи костюма телеприсутствия.
Требуемая физиологией (безопасное пользование без обучения) задержку управления аватаром не > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Гц.
Задержка управления андроидом равна времени задержки приводов костюма телеприсутствия при передаче оператором сигнала андроиду + время передачи сигнала по линии связи к андроиду + время задержки отработки сигнала оператора приводами андроида + время передачи сигнала о выполненном движении по линии связи от андроида к оператору + время задержки отработки приводами костюма телеприсутствия сигнала от андроида.
Задержка управления андроидом равна удвоенному времени передачи сигнала в одну сторону + удвоенное время работы приводов костюма телеприсутствия + время отработки сигнала приводами андроида.
Для реверсивных машин (костюм телеприсутствия) задержка управления приводом – это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов машины.
Наименьшее время задержки управления аватаром через интернет обеспечивает бессерверная обратная связь.
Сложная часть костюма телеприсутствия – экзоперчатка с силовой обратной связью с кистью руки андроида. Эту технологию в 2012г демонстрировала семейная фирма Festo: человек экзоперчаткой силовой обратной связью по проводам управлял кистью руки робота. Экзоперчатка фирмы «Андроидная Техника» может управлять кистью руки андроида силовой обратной связью по радиоволнам или встречными модулированными лазерными лучами.
Пример современной экзоперчатки – HaptX Gloves от фирмы HaptX. В ней есть: силовая и тактильная (на кончиках пальцев) обратная связь, матрица-передатчик тактильной обратной связи.
При управлении через экзоперчатку кистью андроида, матрицы-приемники тактильной обратной связи расположены на поверхности пальцев и ладони кисти андроида.
При управлении через экзоперчатку кистью аватара в виртуальной реальности, роль матрицы-приемника тактильной обратной связи играет чувствительная виртуальная кожа аватара. Тактильный сигнал с виртуальной кожи аватара для перчатки-экзоскелета пользователя симулирует софт компьютерной игры.
Костюм телеприсутствия рассматривают госпрограммы освоения многокилометровых глубин океана принятые в Японии, России. На дне 5,6км Тихого океана Япония найдя месторождения редкоземельных металлов в 1000 раз больше мировых запасов, приняла госпрограмму освоения ресурсов морского дна. Арктика: 30% мировых запасов нефти, газа: в Карском море 13 млрд тонн нефти.
Домашний костюм телеприсутствия как средство телеуправления андроидом по криптозащищенной интернет-линии, позволяет рабочим, инженерам не выходя из дома дистанционно работать андроид-аватаром подводного города (разработка природных ресурсов: нефть, газ, редкоземельные металлы…) в многокилометровой глубине Северного ледовитого океана. Андроид подводного предприятия работает без остановки 24ч в сутки с передачей управления андроидом между операторами разных смен.
Передача управления андроидом с домашнего костюма-1 телеприсутствия (оператор-1) к домашнему костюму-2 телеприсутствия (оператор-2): оператор-2 примет работу в режиме односторонней (от андроида) обратной связи. Костюм-1 телеприсутствия (оператор-1): усиление в направлении «оператор – андроид» плавно уменьшится (сигнализация + процентное усиление на экране) до нуля, в костюме-2 телеприсутствия (оператор-2) плавно растет (сигнализация + процентное усиление на экране) до 100%.
Костюм телеприсутствия как средство телеуправления андроидом разрабатывает российская фирма «Андроидная техника». Планируют применить как костюм виртуальной реальности и универсальный симулятор. Мировой рыночный потенциал домашнего костюма телеприсутствия, как костюма виртуальной реальности многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор), профессиональных и рекламных сайтов, обещает многократно превзойти мировой рыночный потенциал автомобиля (60% мировой промышленности: подрядчики, субподрядчики).
КОСТЮМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ (универсальный симулятор) – находящийся в стадии проектирования экзоскелетный интерфейс для управления человекоподобным аватаром в Метавселенных через тактильно-силовую обратную связь в радиусе 6000км с задержкой управления (связь + её дешифровка + работа сервера + работа приводов) не более 0,1сек.
Представляет собой экзоскелет с пропорциональными датчиками сил, углов и приводами рук, ног внутри 3D-кардана (пересечение 3-х осей у пупка пользователя. Патент 2134193RU А.Стрельцов 1997г) + шлем с 3D-видео и 3D-звуком. 3D-кардан с датчиками угла и приводами передает пользователю векторы сил, ускорения, моменты действующие на тело аватара в 3 осях местного пространства.
Сферический экран шлема, стереокартинка без очков, векторы звуков передает многоканальная акустическая система шлема. Чтобы не гнать обратной связью 150кадр/сек из-за задержки «наклон головы – смена картинки» шлем закреплен в зажимной раме туловища. Сферический экран шлема предполагается максимально возможного (руки пользователя снаружи экрана, чтобы не попали в кадр) диаметра для снижения вероятности головных болей, быстрой утомляемости пользователя от чрезмерного несоответствия (для мозга человека) расстояния «глаз – объект на экране» реальному (по сценарию) расстоянию до этого объекта.
Силовая обратная связь костюма виртуальной реальности передает в обе стороны: углы (перемещения) + угловые скорости (скорости перемещения) + силы (моменты) + скорости изменения сил (скорости изменения моментов). При работе через интернет трафик каналов костюма виртуальной реальности не превышает 10Кб/сек. Это на порядки меньше трафика видеоканала или (при наличии) тактильного канала полнофункциональной (функции аналогичные техническим параметрам кожи среднестатистического человека) виртуальной кожи виртуального аватара.
Костюмы виртуальной реальности по типу управления аватаром делят на:
1. однодатчиковые костюмы виртуальной реальности: привод держит постоянной силу датчика-1 силы экзоскелета руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина.
2. двухдатчиковые костюмы виртуальной реальности: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод.
Скорость привода костюма виртуальной реальности прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
Костюм виртуальной реальности – электродистанционный экзоскелетный интерфейс подвешенный внутри 3D-кардана. Общественную потребность в костюме виртуальной реальности создает быстро растущий мировой рынок многопользовательских интернет-игр. Разными фирмами мира изготовлены все составные материальные элементы костюма виртуальной реальности, созданы протоколы передачи информации силовой обратной связи с аватаром виртуальной реальности.
Главная проблема – задержка управления аватаром в виртуальной реальности, вызванная недостаточным быстродействием приводов экзоскелетного интерфейса – в 21 веке решена в конструкции привода андроида Хонда Азимо: маховик (ротор электромотора на постоянных максимальных оборотах) + магнитореологическая муфта сцепления + редуктор. Магнитореологическая муфта сцепления андроида Азимо соединяет маховик с редуктором за 0,02сек, что соответствует техусловиям обратной связи «костюм виртуальной реальности – аватар виртуальной реальности», определяемыми физиологией человека. Требуемую физиологией (безопасное пользование без обучения) задержку управления аватаром не > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Гц.
Задержка управления андроидом через костюм виртуальной реальности ~1,5 раза > чем аватаром виртуальной реальности: в задержку управления виртуальным аватаром не входит задержка работы приводов андроида.
Задержка управления аватаром виртуальной реальности равна времени задержки приводов костюма виртуальной реальности при передаче оператором сигнала аватару + время передачи сигнала по линии связи к аватару + время вычисления реакции аватара компьютером сервера + время передачи сервером сигнала о выполненном аватаром движении по линии связи к оператору + время задержки отработки приводами костюма виртуальной реальности сигнала от аватара.
Задержка управления аватаром виртуальной реальности в сайтах интернета равна удвоенному времени передачи сигнала в одну сторону + удвоенное время работы приводов костюма виртуальной реальности + время вычисления реакции аватара компьютером сервера.
Для реверсивных машин (костюм виртуальной реальности) задержка управления приводом это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов машины.
Наименьшее время задержки управления аватаром через интернет обеспечивает бессерверная обратная связь.
Сложная часть костюма виртуальной реальности – экзоперчатка с силовой обратной связью с кистью руки робота. Эту технологию в 2012г демонстрировала семейная фирма Festo: человек экзоперчаткой силовой обратной связью по проводам управлял кистью руки робота. Экзоперчатка фирмы «Андроидная Техника» может управлять кистью руки андроида силовой обратной связью по радио или встречными модулированными лазерными лучами.
Пример современной перчатки виртуальной реальности – перчатка HaptX Gloves от фирмы HaptX. В ней есть: силовая и тактильная (на кончиках пальцев) обратная связь, матрица-передатчик тактильной обратной связи.
При управлении через перчатку виртуальной реальности кистью аватара в виртуальной реальности, роль матрицы-приемника тактильной обратной связи играет чувствительная виртуальная кожа аватара. Тактильный сигнал с виртуальной кожи аватара для перчатки пользователя симулирует софт компьютерной игры.
При управлении через перчатку виртуальной реальности кистью реального робота-андроида, матрицы-приемники тактильной обратной связи расположены на поверхности пальцев и ладони кисти андроида.
Костюм телеприсутствия разрабатываемый российской фирмой «Андроидная техника» планируют применить как костюм виртуальной реальности для управления аватаром виртуальной реальности, как универсальный симулятор. Мировой рыночный потенциал домашнего костюма виртуальной реальности, как средства управления аватаром виртуальной реальности многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор) и рекламных сайтов, обещает многократно превзойти мировой рыночный потенциал автомобиля (60% мировой промышленности: подрядчики, субподрядчики).
Домашний костюм виртуальной реальности создаст эффект полного силомоментного участия человека через интернет-сайт в виртуальном мире неотличимом от реального. Пользователь домашнего костюма виртуальной реальности сможет заниматься альпинизмом на Земле, на других планетах по цифровым картам, параметрам (трение, твёрдость, прочность, сыпучесть, температура, теплопроводность) симулируемой среды. Виртуальные путешествия в любое небесное тело Галактики или внутри тела человека (выбор пользователем масштаба). Турсайты: виртуальные путешествия в любую точку планеты, хоть на дно Марианской впадины (в образе андроида) с полным использованием её базы данных. Виртуальная машина времени воспроизведет для пользователя: участие в любом событии Истории, общение с её персонажами: играют актеры, волонтеры с сайтов.
Международный протокол виртуального мира соединит пользователей в сеть «Матрица»: сеть общения виртуального мира, неотличимого от реального. В «Матрица» актеры симулируют для остальных пользователей известных исторических и современных личностей с разных стран в соответствующих виртуальных декорациях. Платные аватарные пользователи «Матрица» смогут общаться с известными историческими и современными личностями, путешествовать с ними, заниматься с ними сексом.
Чтобы виртуальные известные личности не встретились с самим собой, Международный протокол виртуального мира «Матрица» организует Параллельные (Альтернативные) Вселенные (выбор пользователя). Игры, путешествия в домашнем костюме виртуальной реальности в виртуальное будущее: хоть многопользовательские звездные войны Галактических империй: сотни миллионов пользователей-участников одновременно играющих в грандиозной по масштабам игре за или против других пользователей-участников.
КОСТЮМ ДЛЯ ВХОДА В МЕТАВСЕЛЕННУЮ – это пока находящийся в разработке экзоскелетный интерфейс полного силового участия человека-оператора в роли человекоподобного аватара Метавселенной в общем, для миллионов пользователей костюма, интернет-событии или игре. Миллионы аватаров с их владельцами смогут одновременно участвовать в самых разных событиях Метавселенной.
Подобные сценарии приведут к тому, что в будущем оборот денег Метавселенных от собственников (Facebook, Microsoft, Epic Game, Pokemon Go, Google...) сетевых доменов Метавселенной в разы превысит оборот денег реальной (нецифровой) мировой экономики, создаст новые отрасли бизнеса, профессии, рынки, сферы услуг, навыки.
Костюм для входа в Метавселенную создаст эффект полного силового участия человека в виртуальном мире Метавселенной, неотличимом от реального. Пользователь сможет в Метавселенной заниматься альпинизмом на Земле, на других планетах по цифровым картам, параметрам (трение, твёрдость, прочность, сыпучесть, температура, теплопроводность) симулируемой среды. Виртуальные путешествия в любое небесное тело Галактики или внутри тела человека (выбор пользователем масштаба). Турсайты: виртуальные путешествия в любую точку планеты, хоть на дно Марианской впадины с полным использованием её базы данных.
Костюм для входа в Метавселенную позволит не выходя из дома при покупке одежды примерить её на своё тело, потрогать руками цифровой аналог реального товара в цифровом супермаркете.
Костюм для входа в Метавселенную – часть телекоммуникационной системы «ведущий домен – ведомый домен», передающей в обе стороны силовые, тактильные и аудиовизуальные ощущения человека-оператора в реальном времени. Цифровая среда Метавселенной включает в себя тактильную обратную связь, силовую (силомоментную) обратную связь, канал 3D-звука, канал 3D-видео, канал ориентации туловища аватара в пространстве Метавселенной...
Ведущий домен – состоит из человека-оператора и костюма для входа в Метавселенную. В случае взаимодействия между собой пользователей в костюмах для входа в Метавселенную оба домена (ведущий домен, ведомый домен) являются ведущими доменами.
Ведомый домен – управляемый оператором человекоподобный аватар в Метавселенной.
Сетевой домен – интернет-сайт связывающий Ведущий, Ведомый домены. На роль роль главного сетевого домена Метавселенной давно претендует сайт Facebook Марка Цукерберга, основателя самой популярной соцсети. Цукерберг вкладывает миллиарды долларов в Метавселенную, планируя раньше всех освоить новые экологические ниши мировой цифровой экономики.
Средой Метавселенной будут оптоволоконные линии интернета, мобильная связь 5G и 6G.
Сегодня идут попытки стандартизации протоколов Метавселенных, чтобы пользователь мог переходить с одной Метавселенной в другую с своей виртуальной частной собственностью. Фон, часть объектов Метавселенной протокол кеширования заранее грузит в компьютер пользователя для экономии трафика интернета, обновляет при изменениях. Функциональность протоколов Метавселенной пока сильно ограничена из-за отсутствия коммерческих образцов костюмов для входа в Метавселенную с тактильной и силовой (силомоментной) обратными связями.
Костюм для входа в Метавселенную – это подвешенный внутри 3D-кардана экзоскелет с пропорциональными датчиками сил, углов и приводами рук, ног человека-оператора + 3D-картинка шлема виртуальной реальности + 3D-звук. 3D-кардан с датчиками угла и приводами передает пользователю векторы сил, ускорения, моменты действующие на тело аватара в 3 осях виртуального пространства Метавселенной.
Силовая обратная связь костюма для входа в Метавселенную передает по интернету в обе стороны:
1. углы (перемещения)
2. угловые скорости (скорости перемещения)
3. силы (моменты)
4. скорости изменения сил (скорости изменения моментов)
Тактильная обратная связь передает по цифровой линии связи сканируемое с части поверхности аватара через экзоскелетный интерфейс на аналогичный участок кожи человека действие:
1. силы (давления) на кожу человека. Уровни силы (давления) передает на кожу человека матрица пропорциональных датчиков силы (давления) – тактильная матрица давления.
2. температуры на кожу человека. Температуру на кожу человека передает матрица датчиков температуры – тактильная матрица температуры.
3. теплового потока на кожу человека. Тепловой поток на кожу человека передает матрица датчиков теплового потока – тактильная матрица теплового потока. Действие на кожу человека тактильной матрицы теплового потока отличается от действия на кожу человека тактильной матрицы температуры тем, что позволяет человеку на ощупь отличить теплопроводный материал (металл, вода…) от нетеплопроводного материала (дерево…). Металл не меняет своей температуры после контакта с кожей, тогда как например дерево после контакта с кожей быстро нагревается. По скорости нагрева кожи, по цифре теплового потока и его знаку (направление потока) мозг человека различает метал от пластмассы, пластмассу от дерева. Тактильная матрица датчиков температуры может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека. При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Разными фирмами мира изготовлены все составные материальные элементы костюма для входа в Метавселенную, созданы протоколы передачи информации силовой обратной связи с аватаром виртуальной реальности.
Шлем виртуальной реальности.
Сферический экран шлема виртуальной реальности. Стереокартинка без очков. Векторы звуков передает многоканальная акустическая система шлема виртуальной реальности. Чтобы не гнать обратной связью 150кадр/сек из-за задержки «наклон головы – смена картинки» шлем виртуальной реальности закреплен в зажимной раме туловища оператора костюма для входа в Метавселенную.
Сферический экран шлема виртуальной реальности предполагается максимально возможного (руки пользователя снаружи экрана, чтобы не попали в кадр) диаметра для снижения вероятности морской болезни: головных болей, быстрой утомляемости пользователя от чрезмерного несоответствия (для мозга человека) расстояния «глаз – объект на экране» расстоянию до этого объекта в виртуальной реальности.
Перчатка-экзоскелет.
Самая сложная часть костюма для входа в Метавселенную – перчатка-экзоскелет с силовой обратной связью с кистью руки виртуального аватара. Подобную технологию в 2012г демонстрировала семейная фирма Festo: человек перчаткой-экзоскелетом силовой обратной связью по проводам управлял кистью руки робота. Перчатка-экзоскелет фирмы «Андроидная Техника» может управлять кистью руки аватара силовой обратной связью по радиоволнам или встречными модулированными лазерными лучами.
ДАТЧИК – средство измерения физического, химического параметра, характеризующего окружающую среду, процессы внутри организмов или технических объектов. Датчики – управляющий элемент систем отрицательной обратной связи: биодатчики управляют системами стабилизации параметров (температура, химический состав крови…) организма животных. Датчики используют для управления функцией, для передачи, хранения, регистрации, диагностики объекта (системы). Датчики: число измерений физ. величин в промышленности: температура 50%, расход (масса, объем) 15%, давление 10%, уровень 5%, количество (масса, объем) 5%, время 4%, электрические и магнитные величины 4%.
Исторически первый датчик созданный человеком – спусковой механизм (веревка, палка) при наступлении на него освобождавщий энергию (усилитель) упругости ветки (вес груза) при ловле дичи на силки (исполнительный механизм) предками человека.
Датчики:
1. датчик релейного типа (конечный выключатель): 2 состояния: включено, выключено.
2. датчик пропорциональный меняет выходной сигнал пропорционально входному действию.
Датчики:
1. датчик контактный. Пример: конечный выключатель.
2. датчик бесконтактный. Пример: доплеровский измеритель (радар) скорости, бокового сноса (биения отраженного сигнала с разнесенных приемников) крылатой ракеты.
Датчики:
1. датчик управляющий (датчик обратной связи). В автоматических системах в отрицательной обратной связи. В режиме положительной обратной связи: в бесконтактных детонаторах военных боеприпасов, в устройствах контроля проноса запрещенных веществ и предметов в аэропортах…
2. датчик контрольно-измерительный: дает цифру в экран для оператора системы, в средство отображения датчика ручного.
Датчика сигналы:
1. Аналоговый сигнал – аналоговый датчик. Частный случай аналогового сигнала: сигнал рассогласования колебательного контура (или другого базового параметра) датчика с колебательным контуром (с базовым параметром) системы управления рабочим органом или системы диагностики.
2. Цифровой (импульсно-кодовая модуляция) сигнал – цифровой датчик.
Цифровой датчик дает параметр, разность, соотношение параметров в коде (двоичный, троичный): импульсы одинаковой амплитуды + паузы (или смена полярности импульса) между импульсами кратны по времени к минимальной паузе. Троичный код: импульсы + паузы + смена полярности импульса. Шум, неточность аналого-цифрового преобразователя АЦП линейно растут с частотой кривой. Фазовый сдвиг между частотой дискретизации сигнала, высокими частотами сигнала дает биения в сигнале, прошедшем АЦП, цифроаналоговый преобразователь ЦАП: в воспроизведении с микрофона (аналоговый датчик звука) АЦП, ЦАП снижают прозрачность высоких частот звука. Аналоговые датчики 3-10 раз быстрее цифровых, 3-5 раз точнее, дают более качественный сигнал. Трафик аналогового сигнала 3-4 раза меньше цифрового. Цифровые датчики выгоднее в долговременной записи, перезаписи сигнала, в передаче сигнала в условиях помех на расстояние > 20-30м.
Датчики:
1. датчик прямого преобразования внешнего действия в электросигнал: свет в фотоэлементе – сигнал. Неограниченно число физических, химических вариантов прямого преобразования.
2. датчик промежуточного преобразования: фотоэлемент фиксирует пролет элементарной частицы в веществе по вызванной ею вспышке света.
Датчики:
1. датчик активный: для получения сигнала воздействует на объект измерения искусственным энергоисточником, входящим в объект с датчиком. Пример: радар, лидар…
2. датчик полуактивный: для сигнала воздействует на объект измерения искусственным энергоисточником, не входящим в объект с датчиком. Пример: радар зенитной или авиационной ракеты, имеющей приемник радарных импульсов в самой ракете, но использующей внешний (не входит в конструкцию ракеты) передатчик радарных импульсов на земле, на самолете.
3. датчик пассивный: для сигнала не воздействует на объект искусственным излучением дополнительной энергии. Пример: тепловизор, телекамера, глаз.
Датчики:
1. датчик одноканальный (одномерный) дает 1 цифру измеряемого параметра. Пример: вольтметр, амперметр, частотомер, манометр, датчик силы, датчик угла…
2. датчик многоканальный (многомерный) дает информацию в табличной форме. Пример: глаз, телекамера, сенсорный экран, нейтринный телескоп, пузырьковые камеры в ядерной физике, радиотелескоп, оптический телескоп, инфракрасный телескоп, рентгеновский телескоп, микроскоп, томограф… В компьютерных играх, симуляторах функцию датчик многоканальный выполняют мультиплексированные сигналы интерфейса пользователя. Функцию виртуальных датчиков в виртуальной реальности выполняют выходные каналы информации с баз данных (матрицы уравнений обратной связи или таблицы решений) софта компьютерных симуляторов, игр. В математике датчик многоканальный симулирует матрица переменных.
У части датчиков многоканальных диаграмму направленности, фокусировку, установку угла обзора выполняет не материальная структура, а софт. В фазированной антенной решетке нужные диаграмму направленности, фокус дает сканирование передающих или чувствительных ячеек с заданным софтом (или матрицей линий задержки) каждому углу, фокусу временными задержками. Фазированные антенные решетки истребителей раздельно сопровождают до 40 целей. В пленоптической (матрица мелких линз) фотокамере (телекамере) устанавливает угол обзора, фокусирует чисто программно софт, меняя порядок сканирования чувствительных ячеек матрицы отдельно для каждой линзы. Развертка за счет движения спутника вокруг планеты заменила многоканальный датчик одноканальным. Так получена радиолокационная (для крылатых ракет), гравитационная (для баллистических ракет) карты Земли.
Датчики многоканальные (многомерные):
1. датчики без мультиплексирования: табличный многоканальный выход.
2. датчики с мультиплексированием. Мультиплексирование – соединение нескольких каналов связи в одноканальную или двухпроводную связь.
Мультиплексирование датчиков:
1. временное разделение каналов сканированием коммутатором ячеек табличного датчика с кадровым импульсом или кодом конца цикла в выходном сигнале.
2. импульсно-кодовая модуляция. Используют: Интернет, телеметрия. Число каналов неограниченно.
3. амплитудно-полярная модуляция: в разной полярности разные амплитуды несущей частоты. Использовали: стереофоническое аналоговое радиовещание.
4. частотно-полярная модуляция: несущая частота больше частоты полярности.
Многочастотно-полярная модуляция: несущие частоты больше частоты полярности, в разной полярности разная несущая частота. Последовательность несущих частот может меняться. Число несущих частот неограниченно.
5. многочастотная модуляция. Используют: радиоуправление моделями, телеметрия.
6. многочастотная фазовая модуляция. Используют: радиоуправление моделями, телеметрия.
7. суммарный сигнал + урезанный разностный сигнал на повышенной частоте, отделяемой фильтром от суммарного + восстановление разностного сигнала его биениями с эталонной частотой. Использовали: квадрафоническая запись грампластинок.
Датчики:
1. внешний датчик
2. датчик встроен в микросхему
3. датчик встроен в рабочий орган. Пример: оптоволоконный датчик удлинения (на биениях частот) в виде оптоволокна с зеркальным торцом с одного стороны и когерентным светодиодом с другого торца, вклеенный между углеволокнами в углепластиковых конструкциях.
Выходные сигналы датчиков по энергии: электрические, механические, пневматические, гидравлические.
Датчики:
1. Датчик инкрементный вместо цифры дает величину её относительного изменения.
2. Датчик случайных чисел, датчик времени (часы) – единственные датчики создающие сигнал без окружающей среды.
Датчики следящих приводов: датчик-передатчик, датчик-приемник: каждый датчик то и другое попеременно.
Датчик с системой управления соединяют: устройства усиления сигнала, линеаризации, дискретизации, калибровки, аналого-цифрового преобразования, интерфейс.
Датчик ручной – измерительный прибор для человека (как элемента системы): лазерная рулетка, измеритель радиации, вольтметр, амперметр, микрометр…
Параметры датчиков: диапазон чувствительности; погрешность; порог чувствительности; разрешающая способность; отношение сигнал-шум; постоянная времени; частотная характеристика; закон изменения выходной величины от входного действия; пределы изменений входных, выходных величин, диапазон температур, диапазон давлений, диапазон скоростей.
Гистерезис датчика – максимальная разница между измерениями-1-2 датчика. Измерение-1 при уменьшении нагрузки с номинальной выходной мощности. Измерение-2 при увеличении нагрузки с нуля.
Разрешающая способность – минимальное изменение измеряемой цифры которое чувствует датчик.
500м - навигационная точность гравитационного датчика гантельного типа (вес 20кг) ядерной ракеты «Трайдент» независимо от дальности (гравикарта от спутника). В новых ядерных ракетах перешли на гравитационную навигационную систему из 2-х взаимно перпендикулярно соединенных одним концом интерферометров Майкельсона с немагнитными тяжелыми зеркалами на всех 3-х концах датчика. У неё точность ~90м независимо от дальности полета, не работает на конечном атмосферном участке траектории полета из-за вибрации. На конечном участке работают спутниковая и инерциальная системы навигации.
Конструктивный аналог новой гравитационной навигационной системы ядерных ракет – датчик гравитационных волн LIGO из 2 взаимно перпендикулярно соединенных одним концом интерферометров Майкельсона, дающих выходной сигнал по принципу накопления сдвига фаз между импульсами света обоих 4-километровых плеч датчика LIGO. Датчик LIGO впервые в истории детектировал гравитационные волны.
Для увеличения чувствительности в каждом из двух плеч датчика LIGO ячейка Фарадея (модулятор света) пропускает через полупрозрачное зеркало-1 монохроматический импульс света к парному ему зеркалу-2 на расстоянии 4км. Затем ячейка Фарадея делает зеркало-1 непрозрачным, пока импульс света не переотразится между зеркалами 4000 раз. Затем ячейка Фарадея делает зеркало-1 снова прозрачным, чтобы импульс света попал на фотодетектор.
За эти 4000 отражений импульса света от зеркал-1-2 чувствительность датчика вырастает в 2000 раз, что эквивалентно увеличению длины плеча датчика LIGO с 4км до 8000км. Аналогично устроено второе 4-километровое плечо датчика LIGO. Множество подобных решений на высоком инженерном уровне позволяют датчику LIGO фиксировать изменение расстояния между зеркалами на 0,0001 диаметра протона.
Астронавигатор ядерных ракет дает навигационную точность 900м: координаты по 2 пересечениям на глобусе 2-х окружностей равной угловой высоты 2-х звезд. Угловая высота это угол «вертикаль наблюдателя – направление на выбранную звезду в небе». Совокупность точек равных угловых высот на глобусе – окружность. Две звезды – 2 окружности равных угловых высот: пересекаются в 2-х точках, одна из них координаты ракеты, 2-ю отсекают предыдущие координаты.
Гироскоп с электростатическим подвесом (заряжаемый электронно-лучевой пушкой вращающийся шар в полусферических обкладках с отрицательным потенциалом) в подлодках дает в конце кругосветного путешествия навигационную точность 900м.
Самым точный гироскоп – волоконно-оптический гироскоп: катушка с 2км оптоволокна. По оптоволокну в катушке через полупрозрачное зеркало (продольные оси волокон направлены под углом 45° к плоскости зеркала) пропускают в встречных направлениях непрерывное одночастотное (когерентное) лазерные лучи. При вращении в оси перпендикулярной катушке на выходе зеркал луч идущий по вращению катушки увеличит частоту, луч идущий в противоположном направлении уменьшит частоту из-за эффекта Доплера. Угловая скорость – по биениям частот. Встречные лучи выводят через полупрозрачное зеркало (продольные оси волокон направлены под углом 45° к плоскости зеркала) в фотоприемник. Оба луча в виде разнесенных параллельных лучей, дают из-за сферической формы двух волн падающих на плоскую поверхность, интерференционные полосы на линейном многопиксельном фотоприемнике. При изменении частоты биений интерференционные полосы двигаются вдоль фотоприемника. Фотоприемник превращает движение интерференционных полос в выходной электрический сигнал гироскопа.
Самый дорогой датчик: нейтринный телескоп. Самый дорогой мобильный датчик: космический телескоп «Джеймс Уэбб».
Самый низкочастотный радиодатчик: приемно-передающие антенны радиоволн звуковых частот для связи с подлодками на глубине 60м (передача буквы за 20мин несколькими частотами) имеют высоту центральных опор 305м.
Антенна радиоволн звуковых частот подлодки: разматываемый с катушки на 1000м кабель из десятков изолированных позолоченных синтетических волокон. Кабель соединен с электрическим (виртуальным) удлинителем антенны (виртуальный четвертьволновой вибратор: электрическое удлинение антенны резонансной индуктивностью, накапливающей энергию нарастающей четверти периода несущей частоты). В кабеле через каждые 40см микрофоны (фазированная микрофонная решетка) обнаружения подлодок, кораблей. В кабеле каждые 3м магнитометры обнаружения подлодок.
Для связи с подлодкой на глубине 30м самолет Ту-142МР разворачивает в полете трос-антенну СДВ-диапазона длиной 8600м.
Биодатчики:
У человека 12 органов чувств – 12 биодатчиков:
1. зрение. Глаз человека имеет 137млн светочувствительных клеток (7млн для цветного зрения).
2. слух (уши)
3. вкус (язык)
4. голод-насыщение
5. обоняние (нос)
6. осязание (кожа). В подушечке каждого пальца руки 3000 датчиков осязания с разрешением 1мм. На теле человека 1млн датчиков осязания.
7. датчик температуры
8. датчик влажности кожи (датчик теплового потока)
9. вестибулярный аппарат (датчик угла наклона, датчик ускорения).
10. пропорциональный датчик удлинения мышцы
11. пропорциональный датчик силы мышцы
12. датчик времени
1-е цифровые датчики появились в 1960-х как источник сигнала цифровых борткомпьютеров ядерных ракет. 1969г: в СССР получили радиотелеметрию с 13600 датчиков лунной ракеты Н-1.
Понятие «Датчик» привязано к выходному сигналу: в конструкцию датчика, неотделимого от других структур, в принципе не входит всё, что при удалении не меняет сигнал датчика. Датчики неотделимые от других структур:
1. в автоматическом клиноременном центробежном вариаторе центробежные грузы это: датчики оборотов входного вала, усилитель сигнала, привод шкивами меняющий передаточное число. Датчик неотделим от усилителя и привода.
2. в ракетах «Сайдуиндер» в подшипниках внутри управляемых аэродинамических плоскостей ракеты турбины-маховики: роллероны. Встречный поток воздуха раскручивает турбины-маховики в сотни об/сек. Гиромомент маховиков держит постоянной ориентацию осей маховиков, поворотом стабилизаторов выполняя угловую 3D-стабилизацию ракеты: не > 1рад/сек. Датчик неотделим от усилителя, привода.
3. вертолета гиростабилизатор работает механически от соединенных с вращающимся кольцом автомата перекоса 2-х рычагов с грузами: датчик неотделим от усилителя и привода.
4. в электромоторах коллектор это усилитель, датчик: неотделимы от усилителя, в бесколлекторных моторах они разделены.
ПРОПОРЦИОНАЛЬНЫЙ ДАТЧИК СИЛЫ (МОМЕНТА, ДАВЛЕНИЯ) – датчик силы (момента, давления) дающий минимум двухбитный (4 уровня силы для определения скорости изменения силы в быстродействующих системах) выходной сигнал, пропорциональный силе (моменту, давлению) на входе.
В разных приложениях необходимо разное число бит выходного сигнала. В силовой (силомоментной) обратной связи число бит выходного сигнала датчика в разы больше, чем в тактильной обратной связи. В силовой (силомоментной) обратной связи датчик силы (момента, давления) не имеет пикселей (одномерный выходной сигнал). В тактильной обратной связи датчик силы (момента, давления) имеет число пикселей от трех до нескольких миллионов (табличный датчик: многомерный выходной сигнал). В тактильной обратной связи датчик силы может определять не только величину силы, но и (иногда) её 3D-вектор.
По методу получения сигнала пропорциональные датчики силы делят на:
1. датчик на потенциометре с возвратной пружиной
2. датчик электромагнитный с возвратной пружиной
3. тензодатчик проводниковый. Изменение длины напечатанного в виде длинной спирали проводника, меняет его сопротивление, что дает выходной сигнал.
4. тензодатчик проводниковый интерференционный. Работает на принципе сложения частоты опорного генератора и этой же частоты прошедшей через напечатанный в виде спирали проводник. При отсутствии силы в датчике частота опорного генератора и частота прошедшая через растягиваемый проводник настроены в противофазе, давая в выходном сигнале датчика нулевые напряжение, ток. Приложение силы к датчику увеличивает длину проводника, сдвигая фазу частоты на выходе проводника. Сдвиг фазы нарушает режим противофазы, давая выходной сигнал. Чем больше сдвиг фазы, тем больше выходной сигнал.
5. тензодатчик оптоволоконный. Принцип работы основан на интерференции (сложении волн) опорной частоты монохроматического (одночастотного) лазера и этой же частоты прошедшей через отрезок оптоволокна вклеенного в деталь. Один из торцов отрезка оптоволокна имеет зеркальное покрытие для отражения частоты лазера. При отсутствии силы в датчике, частота опорного генератора и частота прошедшая через растягиваемый отрезок оптоволокна настроены в противофазе, давая в выходном сигнале датчика нулевые напряжение, ток. Приложение силы к датчику увеличивает длину отрезка оптоволокна, сдвигая на его выходе (незеркальный торец оптоволокна) фазу частоты относительно опорной частоты лазера. Сдвиг фазы нарушает режим противофазы, давая выходной сигнал. Чем больше сдвиг фазы, тем больше выходной сигнал и сила тока в фотоэлементе, в котором происходит сложение фаз обоих частот.
Пропорциональный датчик силы (момента, давления) используют в:
1. в экспериментальных компьютерных планшетах
2. в графических планшетах
3. в роботах, в костюмах телеприсутствия, в экзоскелетах в качестве элемента тактильной или силовой (силомоментной) обратной связи.
4. в педали газа автомобиля в системе электронной дроссельной заслонки
5. в педали тормоза автомобиля в системе электронных тормозов
6. в аэродинамических элементах (элероны, элевоны) управления некоторых самолетов для силовой обратной связи в электродистанционной системе управления самолетом. Эта система передает рукам летчика (через ручки управления самолетом) масштаб сил в аэродинамических элементах самолета.
7. в экспериментальных экскаваторах с силовой (силомоментной) обратной связью «ковш – оператор». При выемке смешанных материалов – большие камни, залитые илом или глиной – оператор чувствует, обходит камни.
Для роботов, костюмов телеприсутствия, костюмов виртуальной реальности и экзоскелетов более подходят тензодатчики силы: минимальное перемещение элементов датчика при измерении силы уменьшает задержку управления в системе обратной связи.
Применение датчиков силы (момента, давления) ограничено ускорениями (включая угловые ускорения) изделия, в котором их применяют. Если ускорение изделия с датчиками превышает 3g – обычно нужен механизм (рычажный с противовесом) разгрузки от инерционных сил измерительного элемента датчика. Если измеряется непосредственно сила инерции, тогда начиная с ускорения ~5g и выше используют датчики ускорения (акселерометры). Они компактнее, точнее измеряют силу инерции.
УПРАВЛЯЮЩИЙ ЭКЗОСКЕЛЕТ – экзоскелет пальца руки, руки или ноги человека, выполняющий следующие функции:
1. в направлении силовой (силомоментной) обратной связи от человека к аватару (от человека к экзоскелету электродистанционному), управляющий экзоскелет выполняет чисто информационную функцию, не участвуя в прямой передаче силового усилия к пальцу руки, к руке, к ноге аватара (к пальцу руки, к руке или к ноге экзоскелета электродистанционного).
2. управляющий экзоскелет силовой (силомоментной) обратной связью передает человеку-оператору (по установленному графику усиления) силы, моменты действующие на палец руки, на руку или на ногу аватара (на палец руки, на руку или на ногу экзоскелета электродистанционного).
В силовой (силомоментной) обратной связи «человек – аватар» управляющий экзоскелет есть только на стороне человека. Варианты аватара:
1. аватар – реальный андроид, управляемый человеком-оператором через силовую обратную связь.
2. аватар – человекообразный персонаж виртуальной реальности, управляемый человеком-оператором через силовую обратную связь. Силы идущие на управляющий экзоскелет человека-оператора с окружающей аватара виртуальной окружающей среды, генерирует софт виртуальной реальности.
В силовой (силомоментной) обратной связи «управляющий экзоскелет человека-оператора – силовой орган экзоскелета электродистанционного» управляющий экзоскелет присутствует только на конечностях человека-оператора.
Все виды обратной связи, проходящие через управляющий экзоскелет в обоих направлениях, представляют собой частные случаи отрицательной обратной связи.
Основные требования к управляющему экзоскелету:
1. жесткость конструкции для исключения любых движений не содержащихся в сигнале обратной связи.
2. отсутствие зазоров, свободных ходов и упругих деформаций для исключения любых движений не содержащихся в сигнале обратной связи.
3. достаточные быстродействие, силовые (силомоментные) параметры.
СИЛОВАЯ (СИЛОМОМЕНТНАЯ) ОБРАТНАЯ СВЯЗЬ – передача сигналом силовой обратной связи копирующему приводу уровня силы (давления, момента) по линии связи. Передача уровня силы (давления, момента) может быть выполнена:
1. по проводам
2. по оптоволокну
3. через модулируемые электромагнитные волны
4. через модулируемые звуковые, ультразвуковые, гиперзвуковые волны
5. через модулируемое нейтронное излучение
6. через другие формы передачи сигнала через пространство
Силовая (силомоментная) обратная связь в быстродействующих копирующих манипуляторах передает в обе стороны 4 цифры: угол, угловая скорость, сила, скорость изменения силы. Пропорциональные датчики силы, угла плавно меняют выходной сигнал пропорционально входному действию.
Разность углов управляющего и исполнительного манипуляторов дает знак перемещения привода. По знаку Канал силы уравнивает цифры датчиков, двигая тот привод где меньше сила.
Без пропорциональных датчиков силы двухсторонняя отрицательная обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний: совпали углы – сила прижима (захвата) резко колеблется 0-100%.
Чем больше скорость изменения силы, тем больше коэффициент дополнительного усиления для уменьшения задержки управления.
Чем больше скорость изменения силы, угловая скорость, тем больше может быть частота опроса датчиков угла, силы для уменьшения задержки управления.
Чем больше величина силы или скорость её изменения, тем больше софт увеличивает диапазон рассогласования (несовпадения) углов обратной связи для уменьшения задержки управления.
Диапазон рассогласования углов обратной связи мал – исполнительный механизм точнее. Диапазон рассогласования углов больше – исполнительный механизм быстрее, сильнее.
Софт силовой (силомоментной) обратной связи ставит диапазон рассогласования углов в зависимости от величины силы (скорости её изменения) по оптимальному балансу «точность – мощность».
Силовую (силомоментную) обратную связь по типу управления делят на:
1. однодатчиковая силовая (силомоментная) обратная связь: привод держит постоянной силу датчика-1 силы управляющего манипулятора. Переход силы за верхний или нижний порог датчика-1 включает привод управляющего и исполнительного манипуляторов. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения управляющего манипулятора короткоходная пружина.
2. двухдатчиковая силовая (силомоментная) обратная связь: превышение порога разности сил датчиков сгибания и разгибания управляющего манипулятора включает привод. Обратный переход порога выключает привод.
Скорость привода в силовой (силомоментной) обратной связи прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
У силовой (силомоментной) обратной связи обычно линейная зависимость между входным, выходным сигналами. Но встречается и прогрессивное усиление. При квадратичном усилении при росте веса груза вдвое, усиление растет в 4 раза. Это позволяет например оператору экзоскелета поднимать грузы многократно превышающие возможности его мышц.
Силовую (силомоментную) обратную связь применяют в:
1. в авиации для управления аэродинамическими элементами самолета с передачей (по программному графику коэффициента усиления) сил сопротивления воздуха в руки летчика.
2. в системе «костюм телеприсутствия – аватар-андроид».
3. в системе «костюм виртуальной реальности – аватар виртуальной реальности».
4. в электродистанционном экзоскелете для связи по проводам между руками, ногами экзоскелета и руками, ногами человека в экзоскелете.
5. в экспериментальных экскаваторах с передачей сил сопротивления ковшу оператору экскаватора.
Силовая (силомоментная) обратная связь не требует применения компьютера, буферизации сигнала. Наименьшую задержку управления силовой (силомоментной) обратной связью через интернет дает бессерверная обратная связь.
Силовую (силомоментную) обратную связь от тактильной обратной связи отличает:
1. силовая (силомоментная) обратная связь имеет только двухстороннюю обратную связь. Тактильная обратная связь имеет только одностороннюю обратную связь.
2. силовая (силомоментная) обратная связь приложена к конечности, к суставу человека (к рычажным конструкциям и шарниру аватара или других объектов управления) не только силой, но и моментом. Силовая (силомоментная) обратная связь имеет моментную составляющую, нет деления на пиксели. Тактильная обратная связь не имеет моментную составляющую (пиксели передают вектор силы, не момент), есть деление на пиксели.
3. битность сигнала силовой (силомоментной) обратной связи в разы больше, чем в тактильной обратной связи.
4. полный трафик всех каналов (силы, углы) силовой (силомоментной) обратной связи не > 10Кб/сек. Полный трафик всех каналов полнофункциональной тактильной обратной связи аватара с человеком – мегабайты в секунду.
5. в силовой (силомоментной) обратной связи сумма сил в датчиках конечностей аватара равна сумме сил действующих на шарниры аватара. В тактильной обратной связи сумма сил в датчиках может многократно (гидростатическое давление на аватара под водой) превышать сумму сил действующих на шарниры аватара.
6. силовая (силомоментная) обратная связь передает точную цифру силы с учетом коэффициента усиления. Тактильная обратная связь иногда передает цифру силы без изменения (вибрационные технологии).
В силовой (силомоментной) обратной связи могут быть вместо датчика силы использованы тактильные датчики.
Силовую (силомоментную) обратную связь делят на:
1. активная силовая (силомоментная) обратная связь: отрицательная обратная связь между приводами пары объектов. Управляющий объект пары тот, чей сигнал мощнее.
2. пассивная силовая (силомоментная) обратная связь: сигнал отрицательной обратной связи заменяют пружины, возвращающие один с пары объектов в нулевое (стартовое) положение.
ТАКТИЛЬНАЯ ОБРАТНАЯ СВЯЗЬ – передача по цифровой линии связи сканируемого с каждой точки поверхности аватара через экзоскелетный интерфейс на аналогичный участок кожи человека действия:
1. силы (давления) на кожу человека. Уровни силы (давления) передает на кожу человека матрица пропорциональных датчиков силы (давления) – тактильная матрица давления.
2. температуры на кожу человека. Температуру на кожу человека передает матрица датчиков температуры – тактильная матрица температуры.
3. теплового потока на кожу человека. Тепловой поток на кожу человека передает матрица датчиков теплового потока – тактильная матрица теплового потока. Действие на кожу человека тактильной матрицы теплового потока отличается от действия на кожу человека тактильной матрицы температуры тем, что позволяет человеку на ощупь отличить теплопроводный материал (металл, вода…) от нетеплопроводного материала (дерево…). Металл не меняет своей температуры после контакта с кожей, тогда как например дерево после контакта с кожей быстро нагревается. По скорости нагрева кожи, по цифре теплового потока и его знаку (направление потока) мозг человека различает метал от пластмассы, пластмассу от дерева. Тактильная матрица датчиков температуры может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека. При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Тактильную обратную связь от силовой (силомоментной) обратной связи отличает:
1. силовая (силомоментная) обратная связь имеет только двухстороннюю обратную связь. Тактильная обратная связь имеет только одностороннюю обратную связь.
2. силовая (силомоментная) обратная связь приложена к конечности, к суставу человека (к рычажным конструкциям и шарниру аватара или других объектов управления) не только силой, но и моментом. Силовая (силомоментная) обратная связь имеет моментную составляющую, нет деления на пиксели. Тактильная обратная связь не имеет моментную составляющую (пиксели передают вектор силы, не момент), есть деление на пиксели.
3. битность сигнала силовой (силомоментной) обратной связи в разы больше, чем в тактильной обратной связи.
4. полный трафик всех каналов (силы, углы) силовой (силомоментной) обратной связи не > 10Кб/сек. Полный трафик всех каналов полнофункциональной тактильной обратной связи аватара с человеком – мегабайты в секунду.
5. в силовой (силомоментной) обратной связи сумма сил в датчиках конечностей аватара равна сумме сил действующих на шарниры аватара. В тактильной обратной связи сумма сил в датчиках силы (давления) может многократно (гидростатическое давление на аватара под водой) превышать сумму сил действующих на шарниры аватара.
6. тактильная обратная связь иногда передает цифру силы без изменения (вибрационные технологии). Силовая обратная связь передает точную цифру силы с учетом коэффициента усиления.
Тактильные датчики могут быть использованы вместо датчиков силы в силовой (силомоментной) обратной связи.
В тактильной обратной связи тактильные матрицы делят на:
1. матрицы-передатчики – стоят на поверхности аватара.
2. матрицы-приемники (тактильные симуляторы) – стоят в экзоскелетном интерфейсе человека (в другом виде тактильного интерфейса). Например в костюме телеприсутствия, в костюме виртуальной реальности.
Элемент тактильной матрицы – тактильный пиксель. Тактильная обратная связь может быть однобитной (у пикселя только 2 состояния: включено – выключено), мультибитной (пропорциональной). Тактильная обратная связь обеспечивает (повторяемость графика давления в следующих по движению тактильных пикселях) функцию «чувство скольжения пальцев по материалу», если задержка управления пикселями-приемниками (и пикселями-передатчиками) не > 0,1сек (10Гц альфа-ритм мозга: средняя частота опроса мозгом биологических датчиков пропорционального удлинения и силы мышц) и используют многобитные (пропорциональные) тактильные пиксели.
Варианты аватара в тактильной обратной связи:
1. аватар – реальный андроид с тактильной матрицей на всей или части его поверхности.
2. аватар – человекообразный персонаж виртуальной реальности с функцией тактильной матрицы (виртуальная кожа) на всей или части его поверхности.
Тактильные матрицы (реальные или виртуальные, матрицы-приемники вместе с матрицами-передатчиками) вместе с цифровой двухсторонней тактильной отрицательной обратной связью через экзоскелетный интерфейс действуют на кожу человека.
Тактильную обратную связь делят на:
1. полнофункциональную тактильную обратную связь «аватар – человек». На практике пока не реализовано.
2. неполную (частичную) тактильную обратную связь. Например тактильная обратная связь на тыльную часть ладони или на кончики пальцев. Есть примеры практической реализации.
Роль тактильного пикселя в тактильной матрице-приемнике может выполнить пьезоэлемент (сила, температура), магнитострикционный (сила, температура) элемент или воздушное сопло (сила, температура, тепловой поток) с быстродействующим электроклапаном.
Наименьшее время задержки тактильной обратной связи через интернет дает бессерверная обратная связь.
ТАКТИЛЬНЫЙ ИНТЕРНЕТ – виртуальная среда передающая тактильные ощущения через интернет. Тактильный интернет часть цифровой экономики. В тактильный интернет входит телеробототехника (телеприсутствие, телехирургия...). Тактильный интернет делят на:
1. Ведущий домен – человек-оператор и интерфейс в роли которого экзоскелет, тактильная перчатка.... При взаимодействии между собой пользователей в костюмах телеприсутствия оба домена (ведущий домен, ведомый домен) ведущие
2. Ведомый домен – управляемый робот (аватар) или его аналог (аватар виртуальной среды) в виртуальной среде
3. Сетевой домен – интернет-сайт связывающий Ведущий, Ведомый домены.
Тактильный интернет в полнофункциональной форме – сетевой домен соединяет интернетом костюм телеприсутствия (костюм виртуальной реальности) с аватаром-андроидом (аватаром виртуальной реальности).
При использования в Тактильном интернете костюмов виртуальной реальности с аватарами виртуальной реальности возможно одновременное участие миллиардов интернет-пользователей в роли аватаров Метавселенной в общей для них всех интернет игре типа Звездные войны. Подобные сценарии развития Тактильного интернета приведут к тому, что оборот денег Метавселенных от собственников (Facebook, Microsoft, Epic Game, Pokemon Go, Google...) сетевых доменов Тактильного интернета в разы превысит оборот денег реальной (нецифровой) мировой экономики. Тактильный интернет Метавселенной создаст новые отрасли, профессии, рынки, сферы услуг, навыки.
Идет стандартизация протокола Тактильного интернета чтобы пользователь мог не меняя интерфейс Тактильного интернета переходить с одной Метавселенной в другую с своей виртуальной частной собственностью. Фон, часть объектов Метавселенной протокол кеширования заранее грузит в компьютер пользователя для экономии трафика, обновляет при изменениях. Функциональность протоколов Тактильного интернета пока сильно ограничена из-за отсутствия коммерческого образца костюма виртуальной реальности с силовой обратной связью.
Протокол Тактильного интернета прогнозом движений оператора на приемной (ведомый домен) стороне уменьшит задержку тактильной обратной связи. Чем больше тактильное разрешение матрицы тактильных пикселей и число её пикселей, тем больше допустимая задержка тактильной обратной связи.
Тактильный интернет включает в себя тактильную обратную связь, силовую (силомоментную) обратную связь, канал звука, канал стереокамер...
Тактильный интернет позволит не выходя из дома при покупке одежды примерить её на своё тело, потрогать руками товар в цифровом супермаркете.
Тактильная обратная связь передает по цифровой линии связи сканируемое с каждой точки поверхности аватара через экзоскелетный интерфейс на аналогичный участок кожи человека действие:
1. силы (давления) на кожу человека. Уровни силы (давления) передает на кожу человека матрица пропорциональных датчиков силы (давления) – тактильная матрица давления
2. температуры на кожу человека. Температуру на кожу человека передает матрица датчиков температуры – тактильная матрица температуры
3. теплового потока на кожу человека. Тепловой поток на кожу человека передает матрица датчиков теплового потока – тактильная матрица теплового потока. Действие на кожу человека тактильной матрицы теплового потока отличается от действия на кожу человека тактильной матрицы температуры тем, что позволяет человеку на ощупь отличить теплопроводный материал (металл, вода…) от нетеплопроводного материала (дерево…). Металл не меняет своей температуры после контакта с кожей, тогда как например дерево после контакта с кожей быстро нагревается. По скорости нагрева кожи, по цифре теплового потока и его знаку (направление потока) мозг человека различает метал от пластмассы, пластмассу от дерева. Тактильная матрица датчиков температуры может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека. При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Средой Тактильного интернета будет мобильная связь 5G и 6G.
ТАКТИЛЬНЫЙ ПИКСЕЛЬ – минимальный по измерительному (приемному) касанию, элемент тактильной матрицы-передатчика (матрицы-приемника).
Тактильный пиксель передает по цифровой линии связи сканируемой им точки поверхности аватара через экзоскелетный интерфейс на аналогичный участок кожи человека действие:
1. силы (давления) на кожу человека: тактильные пиксели силы (давления). При передаче на кожу человека уровней силы (давления) используют матрицу датчиков силы (давления) – тактильная матрица давления.
2. температуры на кожу человека: тактильные пиксели температуры. При передаче на кожу человека температуры используют матрицу пропорциональных датчиков температуры – тактильная матрица температуры.
3. теплового потока на кожу человека: тактильные пиксели теплового потока.
При передаче на кожу человека теплового потока используют матрицу датчиков теплового потока – тактильная матрица теплового потока. Действие на кожу человека тактильной матрицы теплового потока отличается от действия на кожу человека тактильной матрицы температуры тем, что позволяет человеку на ощупь отличить теплопроводный материал (метал, вода…) от нетеплопроводного материала (дерево…). Метал не меняет своей температуры после контакта с кожей, тогда как например дерево после контакта с кожей начинает быстро нагреваться. По скорости нагрева кожи, по цифре теплового потока и его знаку (направление потока) мозг человека различает метал от пластмассы, пластмассу от дерева. Тактильная матрица датчиков температуры может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека. При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Тактильные пиксели силы (давления) делят на:
1. одноосевые тактильные пиксели силы (давления): дают цифру проекции силы в направлении перпендикулярном поверхности тактильной матрицы. Наиболее вероятное (вероятность не 100%) реальное направление трехмерного вектора силы софт определяет по сигналу силовой (силомоментной) обратной связи.
2. двухосевые тактильные пиксели силы (давления): дают цифру силы и направление вектора силы в одной плоскости измерения. Наиболее вероятное (вероятность не 100%) реальное направление трехмерного вектора силы софт определяет по сигналу силовой (силомоментной) обратной связи.
3. трехосевые тактильные пиксели силы (давления): дают цифру силы и направление вектора силы в трех осях пространства.
Тактильный пиксель в тактильной матрице-приемнике получает, от его аналога-пикселя в матрице-передатчике, сигнал многократно усиленный усилителем на стороне матрицы-приемника. Тактильные пиксели силы (давления) могут быть однобитными (пиксель имеет только 2 состояния: включено – выключено), мультибитными (пропорциональными). Тактильные пиксели обеспечивают (повторяемость графика давления в следующих по движению тактильных пикселях) функцию «чувство скольжения пальцев по материалу», если задержка управления тактильными пикселями-приемниками (и пикселями-передатчиками) не > 0,1сек (10Гц альфа-ритм мозга: средняя частота опроса мозгом пропорциональных биодатчиков силы, удлинения мышц) и используют многобитные (пропорциональные) тактильные пиксели.
Тактильные матрицы делят на:
1. матрицы-передатчики – стоят на поверхности аватара
2. матрицы-приемники – стоят в экзоскелетном интерфейсе человека. Например в костюме телеприсутствия, в костюме виртуальной реальности.
Тактильная матрица-приемник может работать как на цифровом, так и аналоговом сигнале тактильных датчиков робота. Цифровой сигнал точнее, аналоговый сигнал более быстродействующий.
Элементом тактильной матрицы является тактильный пиксель.
Тактильные матрицы (реальные или виртуальные, матрицы-приемники вместе с матрицами-передатчиками) вместе с цифровой двухсторонней тактильной отрицательной обратной связью через экзоскелетный интерфейс действуют на кожу человека. Наиболее вероятные сегодня тактильные пиксели температуры это полупроводниковые датчики-передатчики и датчики-приемники.
Роль тактильного пикселя в тактильной матрице-приемнике может выполнить пьезоэлемент (сила, температура), магнитострикционный (сила, температура) элемент или воздушное сопло (сила, температура, тепловой поток) с быстродействующим электроклапаном.
ТАКТИЛЬНЫЙ СИМУЛЯТОР – тактильный пиксель или матрица тактильных пикселей симулирующих на коже человека физическое действие внешней среды на тактильные датчики робота. Физическое воздействие внешней среды на датчики робота это:
1. тактильные пиксели передающие силу (давление)
2. тактильные пиксели передающие температуру
3. тактильные пиксели передающие скорость теплового потока
Тактильные пиксели передающие силу (давление) делят на:
1. тактильные пиксели передающие силу (давление) в направлении перпендикулярном к поверхности пикселя
2. тактильные пиксели передающие силу (давление) по двум каналам в двух осях пространства
3. тактильные пиксели передающие силу (давление) по трем каналам в любом направлении
Тактильные пиксели передающие силу (давление), могут использовать следующие физические эффекты:
1. обратную электровибрацию
2. поток сжатого воздуха, модулируемого клапаном
3. магнитострикционный эффект
4. пьезострикционный эффект
Тактильные пиксели передающие температуру, могут использовать следующие физические эффекты:
1. поток горячего или холодного сжатого воздуха, модулируемого клапаном
2. пьезострикционный эффект
3. магнитострикционный эффект
Тактильные пиксели передающие скорость теплового потока, могут использовать следующие физические эффекты:
1. поток горячего сжатого воздуха, модулируемого клапаном
2. пьезострикционный эффект
3. магнитострикционный эффект
Тактильный симулятор может работать как на цифровом, так и аналоговом сигнале тактильных датчиков робота. Цифровой сигнал точнее, аналоговый сигнал более быстродействующий.
Тактильный симулятор может быть однобитным (пиксель имеет только 2 состояния: включено – выключено), мультибитным (пропорциональным).
МЕТАВСЕЛЕННАЯ – это социальная виртуальная цифровая 3D-инфраструктура с доступом в неё пользователей в образе 3D-аватаров. Контент Метавселенной создают пользователи, софт создают корпорации и отдельные группы программистов. В Метавселенной нет ограничений на количество одновременных пользователей, есть полностью функционирующая экономика. Метавселенная – частичная копия реального мира, где можно покупать и продавать частную собственность (включая недвижимость), предоставлять собственность в аренду, оформлять кредиты. В Метавселенной пользователи глобальным охватом повышают вероятность коммерческой реализации своих талантов.
В Метавселенных будут цифровые платежи, станут возможны виртуальные путешествия во времени. Пользователь будет выбирать эпоху, в которую хочет попасть.
Facebook создает Метавселенную. Microsoft планирует переносить в Метавселенную игры для Xbox. Epic Games превращает в Метавселенную игру Fortnite. Начато сотрудничество Facebook и Microsoft в создании Метавселенной на единой платформе. Метавселенная – площадка реализации предпринимателями своих товаров и услуг, взаимодействия с клиентами.
Технологическая основа Метавселенной – Тактильный интернет. Средство погружения в Метавселенную – тактильный интерфейс. Пока в начале развития коммерчески доступный и наиболее функциональный тактильный интерфейс это шлем виртуальной реальности с тактильными перчатками.
Технология Тактильного интернета это:
1. Ведущий домен – человек-оператор и интерфейс в роли которого экзоскелет, сенсорная перчатка.... В случае взаимодействия между собой пользователей в костюмах телеприсутствия оба домена (ведущий домен, ведомый домен) являются ведущими доменами.
2. Ведомый домен – управляемый робот (аватар) или его аналог (аватар виртуальной среды) в виртуальной среде.
3. Сетевой домен – интернет-сайт связывающий Ведущий, Ведомый домены. Бессерверная обратная связь обеспечивает минимальную задержку управления.
Тактильный интернет в полнофункциональной форме – сетевой домен соединяет интернетом костюм виртуальной реальности с аватаром виртуальной реальности. В принципе ничто не мешает костюмом виртуальной реальности удаленно выполнять реальную хирургическую операцию, удаленно управлять реальным андроидом. Это ускорит разработки костюмов виртуальной реальности как единственной технологии Тактильного интернета позволяющей получать многомиллиардные ежегодные доходы в будущем.
В Метавселенную вкладывают десятки миллиардов долларов, ожидают многомиллиардные ежегодные доходы в будущем. Очевидно при подобных вложениях стандартным тактильным интерфейсом погружения в Метавселенную в будущем станет полнофункциональный костюм виртуальной реальности, включающий в себя тактильную обратную связь, силовую (силомоментную) обратную связь, канал звука, канал стереокамер...
При использовании для доступа в Метавселенную костюмов виртуальной реальности с аватарами виртуальной реальности возможно одновременное участие миллиардов интернет-пользователей в роли аватаров Метавселенной в общей для них всех интернет-игре типа Звездные войны. Подобные сценарии развития Тактильного интернета приведут к тому, что оборот денег Метавселенных от собственников (Facebook, Microsoft, Epic Game, Pokemon Go, Google...) сетевых доменов Тактильного интернета в разы превысит оборот денег реальной (нецифровой) мировой экономики. Тактильный интернет Метавселенной создаст новые отрасли, профессии, рынки, сферы услуг, навыки.
Идет стандартизация протокола Тактильного интернета, чтобы пользователь мог не меняя интерфейс Тактильного интернета переходить с одной Метавселенной в другую с своей виртуальной частной собственностью. Фон, часть объектов Метавселенной протокол кеширования заранее грузит в компьютер пользователя для экономии трафика, обновляет при изменениях. Функциональность экспериментальных протоколов Тактильного интернета пока сильно ограничена из-за отсутствия коммерческого образца костюма виртуальной реальности с силовой (силомоментной) обратной связью.
Протокол Тактильного интернета прогнозом движений оператора в приемной (ведомый домен) стороне уменьшит задержку тактильной обратной связи. Чем больше тактильное разрешение матриц тактильных пикселей и число их пикселей, тем больше допустимая задержка тактильной обратной связи.
Тактильный интернет Метавселенной позволит не выходя из дома при покупке одежды примерить её на своё тело, потрогать руками товар в цифровом супермаркете. Средой Тактильного интернета будет мобильная связь 5G и 6G.
ПЕРЧАТКА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ – это в полном смысле экзоперчатка с функциями:
1. силовая отрицательная обратная связь кисти человека с окружающей средой в виртуальной реальности или в телеприсутствии
2. угловая отрицательная обратная связь кисти человека с окружающей средой в виртуальной реальности или в телеприсутствии
3. тактильная обратная связь кисти человека с объектами виртуальной реальности или в телеприсутствии. Тактильная обратная связь может быть однобитной (пиксель имеет только 2 состояния: включено – выключено), мультибитной (пропорциональной).
Силовой (силомоментной) обратной связи функции:
1. передача в обоих направлениях связи углов пальцев и ориентации перчатки в местной системе координат.
2. передача человеку силовой отдачи от окружающей среды в виртуальной реальности или в телеприсутствии. Обеспечивают пропорциональные датчики сил (момента, давления) экзоперчатки.
Тактильной обратной связи функции:
1. функция «чувство скольжения пальцев по материалу». Текстуру поверхности можно симулировать электростимуляцией кожи человека.
2. функция действия уровней силы (давления) на кожу человека (чувство текстуры поверхности): тактильные пиксели силы (давления). При передаче на кожу человека уровней силы (давления) используют матрицу пропорциональных датчиков силы (давления) – тактильная матрица давления.
3. функция действия температуры на кожу человека: тактильные пиксели температуры. При передаче на кожу человека температуры используется матрица пропорциональных датчиков температуры – тактильная матрица температуры.
4. функция действия теплового потока на кожу человека: тактильные пиксели теплового потока. При передаче на кожу человека теплового потока используется матрица датчиков теплового потока – тактильная матрица теплового потока. Действие на кожу человека тактильной матрицы теплового потока отличается от действия на кожу человека тактильной матрицы температуры тем, что позволяет человеку на ощупь отличить теплопроводный материал (метал, вода…) от нетеплопроводного материала (дерево…). Метал не меняет своей температуры после контакта с кожей, тогда как например дерево после контакта с кожей начинает быстро нагреваться. По скорости нагрева кожи, по цифре теплового потока и его знаку (направление потока) мозг человека различает метал от пластмассы, пластмассу от дерева. Тактильная матрица датчиков температуры может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека. При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Экзоперчатки делят на:
1. перчатка захвата движения (сенсорная перчатка). Передает в одном направлении связи ориентацию (пьезогироскоп) ладони и углы пальцев в координатах виртуальной реальности
2. экзоперчатка силовая. Передает:
a)в обоих направлениях связи, в двух координатах векторы сил почти (у человека тоже не все фаланги пальцев имеют привод с мышц) в каждой фаланге пальца
b)в обоих направлениях связи углы пальцев, ориентацию ладони
3. экзоперчатка тактильная. Может передавать:
a)в одном направлении связи, в одной двух или трех координатах вектор силы (мультибитная экзоперчатка) в каждом тактильном пикселе
b)в одном направлении связи температуру в каждом тактильном пикселе (на практике пока не осуществлено)
c)в одном направлении связи тепловой поток и его знак в каждом тактильном пикселе (на практике пока не осуществлено)
d)в одном направлении связи углы пальцев, ориентацию ладони.
4. экзоперчатка тактильно-силовая. Может передавать:
a)в обоих направлениях связи, в двух координатах векторы сил почти (у человека тоже не все фаланги пальцев имеют привод с мышц) в каждой фаланге пальца
b)в обоих направлениях связи углы пальцев, ориентацию ладони.
c)в одном направлении связи, в одной двух или трех координатах вектор силы (мультибитная экзоперчатка) в каждом тактильном пикселе
d)в одном направлении связи температуру в каждом тактильном пикселе (на практике пока не осуществлено)
e)в одном направлении связи тепловой поток и его знак в каждом тактильном пикселе (на практике пока не осуществлено)
ОБРАТНАЯ СВЯЗЬ (РОБОТОТЕХНИКА) – отрицательная обратная связь соединяющая датчики робота с виртуальными (алгоритм софта) или реальными датчиками источника-С сигнала управления роботом через каналы связи, приводы, пропорциональные датчики. Канал-1 разностью цифр датчика робота и датчика источника-С находит знак перемещения привода. По знаку канал-2 уравнивает цифры датчиков, действуя приводами робота.
Если окружающая среда действует на датчик робота сильнее, чем источник-С в противоположном направлении, тогда уравнивание цифр датчиков выполняется подстройкой цифры датчика источника-С под цифру датчика робота. В остальных случаях уравнивание цифр датчиков выполняют приводы робота.
Источники сигнала управления роботом делят на:
1. источник сигнала – экзоскелетный интерфейс, джойстик, другой интерфейс человека-оператора управляющего роботом.
2. источник сигнала управления – алгоритм софта.
3. супервизорный источник сигнала управления: часть времени роботом управляет оператор, другую часть времени софт.
Обратную связь в робототехнике делят на:
1. обратная связь по скорости
2. обратная связь по силе (моменту, давлению)
3. тактильная обратная связь
4. позиционная обратная связь (углы, координаты)
5. обратная связь по балансу равновесия робота. Пример: баланс равновесия робота-андроида по датчикам сил его ступней: алгоритм уравнивает цифры датчиков по продольной и поперечной горизонтальным осям ступней.
Обратная связь в робототехнике может быть реализована по следующим каналам связи:
1. по проводам
2. по оптоволокну
3. по радиоканалу
4. по ультразвуковому каналу
5. по терагерцовому каналу
6. по инфракрасному каналу
7. по оптическому каналу
8. по ультрафиолетовому каналу
9. по рентгеновскому каналу
10. по гамма-лучам
11. по нейтронному каналу
12. по нейтринному каналу
13. по мюонному каналу
14. по ионному каналу в вакууме
15. по протонному каналу в вакууме
16. по электронно-лучевому каналу в вакууме
СИЛОВОЕ ТЕЛЕПРИСУТСТВИЕ – управление (интерфейс «человек – робот») аватаром (манипулятором) через двухстороннюю силовую обратную связь, видеосвязь. Видеосвязь может быть дополнена односторонней или двухсторонней акустической связью. В тактильно-силовом телеприсутствии силовая обратная связь дополнена тактильной обратной связью. Тактильная обратная связь всегда односторонняя. Силовая обратная связь всегда двухсторонняя.
Силовая обратная связь кроме силы и скорости изменения силы передает углы (рычажный манипулятор) и угловую скорость, или перемещение и скорость перемещения.
Тактильная обратная связь – аналог кожи человека, который тактильными пикселями передает текстуру поверхности, к которой прикасается человек-оператор силового телеприсутствия. Более совершенная тактильная обратная связь передает не только силу или вектор силы действующей на тактильный пиксель, но и температуру и/или тепловой поток тактильного пикселя.
Силовое телеприсутствие делят на:
1. силовое телеприсутствие роботизированное: аватар – робот
2. силовое телеприсутствие виртуальное: аватар – объект виртуального мира
3. силовое телеприсутствие электронно-биологическое (аватар фильма Джеймса Кэмерона): аватар – биообъект
Самая универсальная система силового телеприсутствия – система «костюм телеприсутствия – робот-андроид». В случае силового телеприсутствия виртуального костюм телеприсутствия называют костюмом виртуальной реальности, хотя конструктивного и программного различия между обоими костюмами нет. Различаются только аватары.
ТАКТИЛЬНО-СИЛОВОЕ ТЕЛЕПРИСУТСТВИЕ – управление (интерфейс «человек – робот») аватаром (манипулятором) через двухстороннюю силовую обратную связь и тактильную обратную связь. Тактильно-силовое телеприсутствие может быть дополнено видеосвязью и односторонней или двухсторонней акустической связью. Тактильная обратная связь всегда односторонняя. Силовая обратная связь всегда двухсторонняя.
Силовая обратная связь кроме силы и скорости изменения силы передает углы (рычажный манипулятор) и угловую скорость или перемещение (манипулятор с направляющими вместо шарниров) и скорость перемещения.
Тактильная обратная связь – аналог кожи человека, который тактильными пикселями передает текстуру поверхности, к которой прикасается человек-оператор силового телеприсутствия. Более совершенная тактильная обратная связь вместе высотой неровности в текстуре поверхности передает не только силу или вектор силы действующей на тактильный пиксель, но и температуру и/или тепловой поток тактильного пикселя.
Тактильно-силовое телеприсутствие делят на:
1. тактильно-силовое телеприсутствие роботизированное: аватар – робот
2. тактильно-силовое телеприсутствие виртуальное: аватар – объект виртуального мира
3. тактильно-силовое телеприсутствие электронно-биологическое (аватар фильма Джеймса Кэмерона): аватар – биообъект
Самая универсальная система тактильно-силового телеприсутствия – система «костюм телеприсутствия – робот-андроид». В случае тактильно-силового телеприсутствия виртуального костюм телеприсутствия называют костюмом виртуальной реальности, хотя конструктивного и программного различия между обоими костюмами нет. Различаются только аватары.
ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ – обратная связь меняющая входной сигнал системы таким образом, чтобы противодействовать изменению выходного сигнала, чтобы ослабить причину рассогласования сигналов.
Отрицательная обратная связь – варианты:
1. Отрицательная обратная связь: способ глушения шумовых частотных диапазонов в усилителях подачей этих частот с выхода на вход с противоположной фазой и равной амплитудой.
2. Отрицательная обратная связь: способ глушения звука подачей звука с микрофона обратной связи на вход усилителя источника звука с противоположной фазой и равной амплитудой.
3. Отрицательную обратную связь используют все формы жизни: от клетки до экосистем. Цепи отрицательной обратной связи человека стабилизируют температуру тела человека на уровне 36,6°С, концентрацию диоксида углерода и глюкозы в крови… Отрицательная обратная связь взаимосвязью численности хищников, растительноядных животных, растений стабилизирует их численность, процентное соотношение в природе.
4. Отрицательная обратная связь односторонняя – способ управления рабочим органом (приводом) доводящий до нуля разницу цифры датчик-передатчика управляющего рабочего органа машины и цифры датчик-приемника исполнительного рабочего органа машины (системы). Средство управления электрическим, гидравлическим, пневматическим, механическим или иным способом вычитает цифру датчик-приемника исполнительного рабочего органа машины с цифры датчик-передатчика.
Получилось отрицательное число: средство управления приводом уменьшит на полученное число цифру датчик-приемника исполнительного рабочего органа машины. Получилось положительное число: средство управления приводом увеличит на полученное число цифру датчик-приемника исполнительного рабочего органа машины.
5. Отрицательная обратная связь односторонняя копирующих манипуляторов – способ управления приводом исполнительного манипулятора, доводящий до нуля разницу цифры датчика управляющего манипулятора и цифры датчика исполнительного манипулятора.
Варианты отрицательной обратной связи копирующих манипуляторов:
a) однодатчиковый копирующий манипулятор: привод держит постоянной силу в датчике-1 силы управляющего манипулятора. Переход за верхний или нижний порог датчика-1 включает привод управляющего и исполнительного манипуляторов. Обратный переход через порог выключает привод. Вместо датчика-2 для обратного движения управляющего манипулятора короткоходная пружина. Приводы двигают оба манипулятора в направлении векторной суммы силы управляющего манипулятора и силы реакции среды в исполнительном манипуляторе.
b) двухдатчиковый копирующий манипулятор: превышение порога разности силы датчика сгибания и силы датчика разгибания управляющего манипулятора включает привод обоих манипуляторов. Обратный переход через порог выключает привод обоих манипуляторов.
6. Отрицательную обратную связь используют в экзоскелете. Человек жмет пропорциональные датчики силы (пружинные или сенсорные кнопки, тензодатчики) рук, ног экзоскелета: пропорциональные датчики силы включая свой привод, убегают от человека, попутно двигая руками, ногами экзоскелета. При использовании пропорциональных датчиков внешняя среда физически управляет человеком приводами экзоскелета, если в установленном масштабе (от линейки резисторов, конденсаторов, катушек на ферритовых сердечниках, кварцевых колебательных контуров или графика в софте) сила человека меньше силы в приводах электродистанционного экзоскелета.
Отрицательную обратную связь в экзоскелете можно сделать без сложной электроники, без компьютера. Требуемую физиологией (пользование экзоскелетом без обучения) человека задержку управления экзоскелетом не > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Гц.
Задержка управления в отрицательной обратной связи это время разгона приводом части машины до максимальной скорости и последующего торможения до нуля с учетом упругих деформаций, люфтов машины. Для реверсивных машин (к ним относится экзоскелет) задержка управления в отрицательной обратной связи это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов машины.
7. Электродистанционная двухсторонняя отрицательная обратная связь: привод органа управления машины по проводам, по оптоволокну (по радио, по оптическому, инфракрасному, ультрафиолетовому, рентгеновскому, терагерцовому каналу, по гамма-лучам, по ультразвуковому, по нейтронному, по нейтринному, по мюонному каналу, по протонному или ионному каналу в вакууме…) соединяет с приводом рабочего органа машины 2 или 4 каналами связи + 2 привода (актуатора) + 2 датчика угла (перемещения) + 2 датчика силы (давления).
Канал-1 разностью углов (перемещений) датчиков частей-А-В находит знак перемещения привода. По знаку канал-2 уравняет цифры датчиков углов, сил двигая приводом часть машины, где меньше сила.
Без датчиков силы двухсторонняя отрицательная обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний; сила захвата, прижима (в манипуляторах) резко колеблется 0-100% при совпадении углов.
При требовании малой задержки управления электродистанционная двухсторонняя отрицательная обратная связь передает не 2, а 4 канала: угол (перемещение) + угловая скорость (скорость перемещения) + сила (момент) + скорость изменения силы (скорость изменения момента).
В технике двухстороннюю силомоментную отрицательную обратную связь называют электродистанционной системой управления: силу (момент, давление), угол (перемещение) передает линия связи без прямой механической связи. В списке функций: ограничения, калибровка, самодиагностика, тесты, отключение неисправного канала дублирования…
Электродистанционная двухсторонняя отрицательная обратная связь двигает орган управления машины, если в установленном масштабе (от линейки резисторов, конденсаторов, ферритовых катушек, кварцевых колебательных контуров или графика в софте) управляющая сила в органе управления меньше силы в приводе рабочего органа.
По знаку направления перемещения привода приоритет у канала датчиков угла, по величине перемещения приоритет у датчиков силы. Электродистанционную отрицательную обратную связь можно сделать без сложной электроники, без компьютера.
8. Отрицательная обратная связь автономных роботов: компьютер автономного робота в реальном времени по алгоритмам строит виртуальную модель действия, подключая к ней в реальном времени отрицательную обратную связь «модель действия – приводы, датчики робота».
Параметры отрицательной обратной связи: задержка управления, диапазон частот (сил, мощностей) паразитных колебаний, частота опроса датчиков, диапазон рассогласования углов, диапазон рассогласования сил, сила (момент), скорость изменения силы (скорость изменения момента), скорость, мощность, ускорение, угловая скорость…
Компьютерная отрицательная обратная связь: выходной сигнал компьютер подгоняет к входному по цифрам графика. Таблица решений может быть в электронной, в магнитной, в оптической, в механической (кулачок), в пневматической (вращающийся диск с отверстиями; двигающаяся лента с отверстиями; перфокарта с отверстиями; пневмоника), в электрохимической (диск, лента или нить с переменной толщиной электролитического покрытия), в радиационной (диск, лента или нить с переменным уровнем радиоактивного излучения: альфа или бета-излучения) или в другой форме.
ЭЛЕКТРОДИСТАНЦИОННОЕ УПРАВЛЕНИЕ – силовое управление человеком рабочим органом по линии связи без прямой механической связи.
ИНТЕРФЕЙС – средства соединяющие человека с техническими средствами получения, управления информацией или процессом.
АВАТАР-САЙТ: сайт для управления через костюм телеприсутствия аватаром виртуального мира на сервере, реальным андроидом на Земле или околоземной орбите.
ЭВОЛЮЦИЯ СКАФАНДРА:
1. экзоскелет с электродистанционным (управление по проводам) интерфейсом. Электродистанционный интерфейс с экзоскелетом соединен только кабелем электропитания с цифровой линией связи: достаточно 2 провода на обратную связь, энергоподачу. Электродистанционный интерфейс экзоскелета: герметичная коробка с экзоскелетами рук, ног человека, разъемом кабеля соединяющая по проводам руки, ноги человека с руками, ногами экзоскелета.
Нет механических уплотнений движущихся деталей, герметичных соединений трубопроводов. Космонавт входит в коробку, герметизирует дверцу, управляет экзоскелетом. Электродистанционный интерфейс экзоскелета решает проблему герметизации космонавта от вакуума, от плотных горячих атмосфер планет типа Венеры.
Полеты космонавтов на планеты с большой гравитацией возможны в экзоскелетах с большим усилением: космонавты не потянут физически вес скафандра и тела. В скафандре космонавт наберет смертельную дозу радиации космических лучей за 200ч. Вес радиационной защиты от космических лучей, от солнечных бурь несёт экзоскелет.
2. телеуправляемый андроид. Андроидом экзоскелетным интерфейсом управляет человек в режиме копирующего манипулятора: отрицательная обратная связь по углам, силам через радиолинию связи. Телеуправляемый андроид дешевле, не требует затрат на восстановление здоровья космонавтов после планет с большой гравитацией, не требует энергии транспортировки космонавта, системы жизнеобеспечения, радиационной защиты. На горячих планетах типа Венеры телеуправляемые андроиды на порядки дешевле экзоскелетов с теплоизоляцией космонавта.
РОБОТ – приводной механизм с 2 и более степенями свободы, управляемый источником сигнала управления, имеющий некоторую автономность, движущийся в своей рабочей среде, выполняющий предназначенные ему задачи.
Источники сигнала управления роботом делят на:
1. бортовой источник (программное устройство) сигнала управления роботом. Эволюционировал от кулачкового программного устройства до современного компьютера.
2. внешний источник сигнала управления роботом. Обычно компьютер.
Бортовые источники сигнала управления роботом делят на:
1. программный источник сигнала управления роботом.
2. программно-датчиковый источник сигнала управления роботом. Включает в себя не только программу, но и обратные (силовые, тактильные…) связи «датчик робота – привод». Программа корректирует выходной сигнал обратной связи или использует сигналы датчиков робота для распознавания объекта (среды), определения направления на объект и других целей. Пример: робот-андроид Asimo (Асимо) фирмы Honda.
Внешние источники сигнала управления роботом делят на:
1. программное серверное управление роботом по линии связи. Пример: собака-робот Aibo фирмы Sony, управляемая искусственным интеллектом через интернет.
2. управление роботом телеприсутствия через интерфейс «человек – робот». Примеры: оператор управляет роботом телеприсутствия через геймпад, джойстик, экзоскелет, костюм телеприсутствия… Теоретически оператором робота телеприсутствия может быть домашнее животное.
Пример внешнего источника сигнала управления робота: общий сервер управляет несколькими промышленными роботами одновременно.
Разделение на бортовой и внешний источник сигнала управления роботом определяет расстояние (пока нет международного стандарта) «робот – источник сигнала управления». Источник сигнала управления роботом может управлять не только приводами робота, но и параметрами (диаграмма направленности сонара или радара, фокусировка телекамеры…) датчиков робота.
Роботы делят на:
1. промышленные
2. военные (боевые, разведывательные, инженерные, саперные…)
3. медицинские (хирургические, диагностические…)
4. роботы-пожарные
5. подводные роботы
6. летающие роботы
7. транспортные
8. сельскохозяйственные
9. сервисные (профессиональные, персональные)
10. бытовые (роботы-животные, роботы-игрушки…)
11. социальные
12. роботы-учителя
13. роботы-актеры
14. исследовательские
15. роботы-планетоходы
16. микророботы
17. спортивные
18. секс-роботы
По энергоисточнику роботы делят на:
1. роботы на жидком топливе
2. роботы на электрическом аккумуляторе (супермаховик, химический аккумулятор…)
3. роботы на топливном элементе.
4. роботы на жидком газе (азот, углекислота…)
5. роботы на тепловом (рабочий орган: поршень, турбина…) аккумуляторе
По приводу роботы делят на:
1. с двигателем внутреннего сгорания (микротурбины, поршневые двигатели…)
2. электрические.
3. пневматические.
4. гидравлические.
5. с турбиной на жидком газе (баллон с углекислотой, с жидким азотом).
По типу соединения «двигатель – редуктор» роботы делят на:
1. роботы с прямым (неуправляемым) соединением двигателя с редуктором или манипулятором робота
2. роботы с управляемым (регулируемая муфта сцепления, регулируемый амортизатор) соединением двигателя с редуктором или манипулятором
По типу редуктора роботы делят на:
1. роботы с редуктором на зубчатых колесах (волновые и др.)
2. роботы с редуктором на основе пары «винт – гайка», «винт – шариковая гайка».
3. роботы с червячным редуктором.
4. роботы с тросовым редуктором.
5. роботы с кулачковым редуктором.
По типу рабочего органа привода пневматические, гидравлические роботы делят на:
1. поршневые.
2. лопастные.
3. турбинные.
4. искусственные мышцы из гибких диагонально-армированных трубок, сокращающихся в длине с подачей давления воздуха.
В IT-технологиях робот – автономно действующая программа: бот, поисковый робот…
АДАПТИВНЫЙ РОБОТ – робот с приводами имеющими обратную связь с датчиками оценки внешней среды. Адаптивный робот имеет софт с алгоритмами и параметрами обратных связей приводов с датчиками оценки внешней среды.
В адаптивных роботах приводы обычно имеют отрицательную обратную связь с моделью отслеживаемой области объекта в софте. Датчик оценки внешней среды находит разницу между отслеживаемой областью объекта в внешней среде и её моделью в софте.
Разницу софт передает на привод. Привод разницу уменьшает до нуля двигая захват, инструмент адаптивного робота.
Модель взаимодействия может обеспечивать обратную связь робота с внешней средой по:
1. положению рабочего органа робота относительно отслеживаемой области объекта внешней среды
2. параметрам излучения объекта в внешней среде
3. тепловому потоку через объект в внешней среде
4. электромагнитным параметрам объекта в внешней среде
5. электрическим параметрам объекта в внешней среде
6. другим параметрам объекта в внешней среде
Обратную связь захвата робота с датчиками оценки внешней среды делят на:
1. одномерную обратную связь. Угловое или линейное движение рабочего органа робота в одной оси пространства
2. двухмерную обратную связь. Угловое и/или линейное движение рабочего органа робота в двух осях пространства
3. трехмерную обратную связь. Угловое и/или линейное движение рабочего органа робота в трех и более осях пространства
Адаптивные роботы делят на:
1. роботы с собственными датчиками оценки внешней среды
2. роботы с внешними и собственными датчиками оценки внешней среды
Очувствленный робот не адаптивный, если нет собственных датчиков оценки внешней среды.
Адаптивные роботы применяют в сварке несерийных изделий, габаритных конструкций, при обслуживании станков с ЧПУ, при окраске, термической резке, шлифовке, фрезеровке, при нанесении клея или герметика. Адаптивные роботы компенсируют неточность сборки перед сваркой, отклонение геометрии изделия от чертежа.
Не адаптивные роботы можно сделать адаптивными оснастив датчиками (ультразвуковыми, инфракрасными...) оценки внешней среды с их софтом.
Адаптивные роботы с датчиками оценки внешней среды, предотвращающими столкновение робота с человеком, называют коботами.
КОБОТ – робот с датчиками оценки внешней среды, предотвращающими столкновение робота с человеком. Коботы – разновидность адаптивных роботов.
МАНИПУЛЯТОР:
1. манипулятор – закрепленный в точке опоры с одной стороны механизм перемещения в пространстве материальных объектов. Манипулятор может иметь дополнительно средства перемещения точки опоры манипулятора: направляющие, рельсы, колесный, гусеничный, шагающий движители, винты, крылья в воздухе или ракетные двигатели, силовые гироскопы.
2. манипулятор игровой – предмет с датчиками, с ограниченной двухсторонней линией обратной связи человека с игровой компьютерной программой или симулятором. В направлении «человек – компьютер» обратная связь по линии связи. В обратном направлении обычно зрительная обратная связь «экран – человек». Самый распространенный манипулятор игровой: геймпад.
3. Манипулятор компьютерный – интерфейс «кисть человека – курсор экрана», «телекамера, снимающая человека – компьютерная игра», «телекамера, снимающая человека – интерактивная функция». Манипулятор компьютерный – предмет с датчиками, линией ограниченной двухсторонней обратной связи человека с игровой компьютерной программой, с симулятором или с интерактивной функцией. В направлении «человек – компьютер» обратная связь по линии связи. В обратном направлении обычно зрительная связь «экран – человек». Самые распространенные манипуляторы компьютерные: компьютерная мышь, геймпад.
4. Манипулятор обратной связи – интерфейс с датчиками, соединяющий кисть, руку человека с управляемым им манипулятором робота односторонней обратной связью. Используют в программировании движений промышленных роботов. Манипулятор двухсторонней обратной связи выполняет двухстороннюю передачу сил, пространственного положения (углов) каналами обратной связи «человек – робот» и «робот – человек», «человек – аватар виртуальной реальности» и «виртуальной реальности аватар – человек», «человек – самолет» и «самолет – человек» (адаптивная система управления элеронами самолета). Двухсторонняя обратная связь работает по принципу вычитания сил: сила передается с той стороны, с которой сила больше. С учетом установок масштаба сил. Манипулятор обратной связи с двухсторонней обратной связью используют в авиации, в экзоскелетах, симуляторах, роботах.
АЛГОРИТМЫ ХОДЬБЫ АНДРОИДА
Исторически первый алгоритм ходьбы андроида – алгоритм «точка нулевого момента».
Алгоритм «точка нулевого момента» (упрощенно): в ходьбе при опоре андроида только на одну ступню, прикладываемый к голеностопному суставу (шарниру) крутящий момент от опоры ступни не должен двигать центр давления за пределы опорной поверхности ступни. В идеале момент нулевой, что означает – центр давления совпадает с центром опорной поверхности ступни.
Голеностопный шарнир андроида для управления устойчивостью имеет продольную и поперечную горизонтальные оси с моментами-1-2. Сигнал обоих моментов софт андроида берет с трех разнесенных датчиков силы снизу ступни. Вертикаль андроида поддерживает приводами двухосевой датчик наклона туловища. Датчик наклона не требует коррекции на поворотах.
Современные алгоритмы ходьбы андроида используют таблицы инерции андроида и выравнивание приводами сил в трех разнесенных датчиках силы ступни. Софт управляет приводами андроида, используя на разных скоростях и ускорениях ходьбы разные таблицы инерции андроида.
ВОЕННЫЙ АНДРОИД – мобильное шагающее двуногое двухрукое оружие. Военный андроид может быть телеуправляемым, автономным с ИИ. Телеуправляемым управляет человек-оператор.
РЕГУЛЯТОР – материальный или информационный объект преобразующий сигнал (воздействие) на входе в соответствующий по заложенной в этот объект программе сигнал (воздействие) на выходе. Простые регуляторы имеют положительную или отрицательную обратную связь. Положительная обратная связь работает по принципу: чем больше сигнал на входе, тем больше на выходе; чем меньше сигнал на входе, тем меньше на выходе. Отрицательная обратная связь работает по принципу: больше сигнал на входе – меньше на выходе. Сложные регуляторы: регуляторы, использующие в своей программе положительную и отрицательную обратную связь. Пример: рынок – регулятор спроса на товары, услуги.
МУЛЬТИПЛЕКС (МУЛЬТИПЛЕКСИРОВАНИЕ) – соединение многих каналов информации через 2 провода (ШИНА), или в 1 оптоволокне, или в 1 приемопередатчике в 1 фиксированной частотной полосе. Чаще мультиплекс это соединение нескольких каналов информации в один общий канал. Табличный многоканальный сигнал датчика в мультиплексный сигнал превращает обычно микросхема. Мультиплекс делят на:
1. параллельный мультиплекс. Соединяя каналы информации в приемопередатчике параллельный мультиплекс обычно использует кратные несущие частоты.
2. последовательный мультиплекс
Параллельный мультиплекс разделяет сигналы:
1. по диапазону амплитуд
2. амплитудно-полярной модуляцией: в разной полярности разные амплитуды несущей частоты. Использовали: стереофоническое аналоговое радиовещание в ряде стран.
3. многочастотной модуляцией. Используют: радиоуправление моделями, телеметрия. Сигнал высокой частоты иногда используют как несущую сигнала низкой частоты.
4. многочастотно-полярной модуляцией: несущие частоты больше частоты полярности, в разной полярности разная несущая частота. Последовательность несущих частот может меняться. Число несущих частот неограничено.
5. частотно-полярной модуляцией: несущая частота больше частоты полярности.
6. многочастотной фазовой модуляцией. Используют: радиоуправление моделями, телеметрия.
7. фазо-полярной модуляцией: несущая частота больше частоты полярности.
8. по частотным полосам + восстановление канала верхней частотной полосы её биениями с опорной эталонной частотой. Использовали: квадрофоническая запись грампластинок.
9. по скорости роста амплитуды
10. суммарный сигнал + урезанный разностный сигнал на повышенной частоте, отделяемой фильтром от суммарного + восстановление разностного сигнала его биениями с эталонной частотой. Использовали: квадрофоническая запись грампластинок.
Последовательный мультиплекс разделяет сигналы:
11. по времени методом сканирования коммутатором ячеек табличного датчика с внесением в выходной сигнал кадрового импульса или кода конца цикла сканирования.
12. по времени импульсно-кодовой модуляцией. Используют: Интернет, телеметрия. Число каналов неограничено.
В сверхбыстром мультиплексе каждый потребитель мультиплекса самостоятельно обрабатывает стандартными алгоритмами весь поток информации, чтобы не тратить время на поиск и декодирование обработанной информации от других потребителей. В параллельном мультиплексе проще обработка каналов, нет проблем с коммутацией каналов.
НАПРЯЖЕНИЕ – цифра (в Вольтах) пропорциональная средней скорости элементарных зарядов (электроны, ионы) прошедших через сечение.
СИЛА ТОКА – цифра (в Амперах) пропорциональная количеству элементарных зарядов (электроны, ионы) прошедших через единицу сечения за единицу времени.
ТОК ПРОВОДИМОСТИ – направленное перемещение ионов (или «дырок» в полупроводниках) и (или) электронов в проводниках и полупроводниках.
ТОК СМЕЩЕНИЯ – продольная волна передаваемая электронными оболочками одних молекул электронным оболочкам других молекул. Максимальная длина электронной волны тока смещения равна удвоенному смещению электронной оболочки молекулы. С помощью тока смещения используют диэлектрик как антенну или провод для передачи электроэнергии или информации. Ток смещения имеет практическое значение в диапазоне частот индивидуальном для каждого вещества.
ТОК ПОЛЯРИЗАЦИИ – продольная волна переменного или пульсирующего тока, передаваемая электронными оболочками молекул одной обкладки конденсатора к другой. Максимальная длина волны тока поляризации равна удвоенному смещению электронной оболочки молекулы одной обкладки конденсатора. С помощью тока поляризации электроэнергия или информация передается сквозь диэлектрик с гальванической развязкой входного и выходного токов. Ток поляризации прямо пропорционален:
1. площади перекрытия обкладок конденсатора
2. скорости нарастания тока
3. частоте тока
4. диэлектрической проницаемости диэлектрика между обкладками конденсатора.
Ток поляризации обратно пропорционален толщине диэлектрика между обкладками конденсатора.
ТОК ИОННЫЙ – движение ионов переносящее положительный заряд.
ТРАНСФОРМАТОР ПОСТОЯННОГО ТОКА – трансформатор в первичной обмотке которого ток медленно нарастает, быстро спадает (распространенный вариант), или быстро нарастает, медленно спадает. В вторичной обмотке наводится пульсирующий постоянный ток. Используют для бесконтактного теплоизолированного наполнения энергией сверхпроводникового кольцевого накопителя энергии.
РАЗНИЦА МЕЖДУ УГЛОМ АТАКИ И ТАНГАЖОМ
Угол атаки самолета – угол между вектором его движения и продольной осью фюзеляжа. Тангаж у самолета – угол между горизонтальной составляющей вектора движения и продольной осью фюзеляжа.
Угол атаки у ракеты, подлодки – угол между вектором её движения и продольной осью ракеты, подлодки. Тангаж у ракеты, подлодки – угол между горизонтальной составляющей вектора движения и продольной осью ракеты, подлодки.
Угол атаки измеряют в системе координат привязанной только к двигающемуся аппарату.
Тангаж измеряют в системе координат привязанной к вертикали Земли, к горизонтальной составляющей вектора движения аппарата. Начало координат – центр масс аппарата.
Для горизонтально летящего самолета угол атаки и тангаж совпадают. Они различаются при вираже, изменении высоты полета любого летательного аппарата.
Тангаж по горизонту отсчитывать не верно из-за:
1. при увеличении высоты полета горизонт уходит вниз из-за шаровидной формы Землм.
2. понятие тангаж используют на подлодках, которые горизонт не могут видеть ни глазами подводников, ни датчиками.
3. горизонт виден не всегда, вертикаль (для построения горизонтальной составляющей вектора движения аппарата) фиксирует человек или датчики летательного аппарата. Датчики находят вертикаль прямыми (датчик угла наклона, гироскоп) и косвенными способами (инфракрасный датчик вертикали космического корабля, датчик астронавигации...).
Тангаж у кораблей – угол продольной качки.
Угол атаки космического корабля – угол между вектором его движения и его основной аэродинамической поверхностью.
ФЛАТТЕР – высокоамплитудный резонанс разрушающий конструкцию консольных аэродинамических плоскостей летательных аппаратов от давления потока газа. Впервые: 1917г при замене деревянных плоскостей винта самолета стальными. Флаттер убирают повышением жесткости консоли, применением высокомодульных материалов, установкой противофлаттерного груза в свободном конце консоли, уменьшением скорости газового потока.
АЭРОДИНАМИЧЕСКИЙ ФОКУС – точка приложения силы газового потока к объекту. Расположение точки приложения силы зависит от угла атаки, скорости, химического состава газового потока, формы тела, смещения центра масс от центра объема.
АЭРОДИНАМИЧЕСКАЯ ОБРАТНАЯ СВЯЗЬ:
1. Аэродинамическая обратная связь – стабилизация летательного аппарата энергией встречного потока воздуха через плоскости стабилизаторов в задней части летательного аппарата.
2. Аэродинамическая обратная связь – стабилизация летательного аппарата энергией встречного потока воздуха роллеронами: маховиками с турбинными лопатками. Впервые роллероны в аэродинамической обратной связи применил в 1952г Уильям Б. Мак-Лин в созданной им ракете «Сайдуиндер»: внутри плоскостей задних аэродинамических стабилизаторов маховик с турбинными лопатками снаружи обода маховика. Наружу из свободного конца плоскости каждого стабилизатора торчат только турбинные лопатки маховиков. Встречный поток воздуха раскручивает лопатками турбины-маховики до сотен оборотов в секунду. Гиромомент маховиков, поддерживая постоянной ориентацию осей маховиков, поворотом стабилизаторов выполняет угловую 3D-стабилизацию (не более 1 радиан в секунду) ракеты.
3. Аэродинамическая обратная связь от энергии встречного потока воздуха может управлять летательным аппаратом не только силовым действием на управляющие плоскости, но и вычислять управляющий сигнал пневматическими струйными элементами пневматического компьютера, работающего на энергии встречного потока воздуха.
4. Аэродинамическая обратная связь от энергии встречного потока воздуха может выполняться не только силовым действием на исполнительный элемент обратной связи или вычислением управляющего сигнала обратной связи. Но и выполняться через использование энергии встречного потока воздуха для функционирования датчика обратной связи. Например получать ультразвук для ультразвукового датчика энергии встречного потока воздуха, проходящего через ультразвуковой свисток. Аэродинамическая обратная связь может на гиперзвуковых скоростях использовать тепловой эффект в ударной волновой поверхности от энергии встречного потока для функционирования теплового датчика аэродинамической обратной связи. Аэродинамическая обратная связь может функционировать с использованием неограниченного числа физических, химических, геометрических эффектов.
ГРАВИТАЦИОННАЯ НАВИГАЦИОННАЯ СИСТЕМА – дублирующая система навигации межконтинентальных баллистических ракет, использующая гравиметрическую карту Земли созданную спутниками гравитационного картографирования.
Гравиметрическая карта передает гравитационный рельеф Земли (гравитационный геоид), который нужно по некоторым территориям обновлять (не чаще нескольких десятков лет для баллистических ракет) после землетрясений. Гравиметрическая карта Земли высокого разрешения гостайна стран имеющих технологию её получения.
Исторически 1-я в ракетостроении – установленная в 1980-х на гироплатформе гантельная гравитационная навигационная система. Двухмерный датчик гравитации – две гантели из тяжелого немагнитного твердого сплава, вращающихся на практически пересекающихся под прямым углом нитях крутильных весов. Гантели крест на крест расположены в одной плоскости. Их продольные оси перпендикулярны нитям крутильных весов.
Каждая половинка гантели находится между двумя половинками другой гантели. Гантели, стремясь расположиться параллельно вектору силы гравитации, поворачиваются на нанометры. На гантелях зеркала образуют с парными зеркалами в корпусе датчика лазерный интерферометр, превращающий взаимное перемещение зеркал в выходной сигнал пропорциональный частоте биений между частотой зеркальной волны и частотой опорного генератора волны.
Частота зеркальной волны и частота опорного генератора волны в виде разнесенных параллельных лучей, дают из-за сферической формы двух волн падающих на плоскую поверхность, интерференционные полосы на линейном многопиксельном фотоприемнике. При изменении частоты биений интерференционные полосы двигаются вдоль фотоприемника. Фотоприемник превращает движение интерференционных полос в выходной электрический сигнал.
Трехмерный вектор силы гравитации получают за счет накопления сигнала и перемещения ракеты перпендикулярно плоскости двухмерного вектора гравитации гравитационного датчика.
У термостабилизированной гантельной (взаимно перпендикулярные две гантели на крутильных весах) гравитационной навигационной системы морской ядерной ракеты «Трайдент» (вес датчика 20кг) круговое вероятное отклонение 500м (независимо от дальности полета) при отклонении конца вектора силы гравитации 10 в минус 5-й, 10 в минус 6-й степени длины вектора. Проекция этого вектора силы на горизонтальную плоскость дает сигналы коррекции движения ракеты. Главный вклад в точность гравитационной навигационной системы вносит информация скорости изменении величины и знака боковой проекции вектора силы гравитации на горизонтальную плоскость.
В момент коррекции движения сигнал гравитационного датчика теряется (координаты ведут другие навигационные системы). От алгоритма софта и системы коррекции курса требуют минимальное суммарное время коррекции курса за всё время полета.
Точность гравидатчика ограничена необходимостью увеличивать период усреднения (фильтрация вибраций ракеты) ускорения по вертикали при росте вибраций ракеты от сопротивления внешней среды, от активного управления ракетой борткомпьютером.
Точность гравидатчика прямо пропорциональна скорости изменения силы гравитации по ходу полета ракеты. Более низкие траектории полета ракеты увеличивают точность гравидатчика.
Гравидатчик ракет сравнивая полученный в полете гравитационный рельеф прилегающей местности с гравиметрической картой высокого разрешения в борткомпьютере, находит координаты ракеты даже без начальных координат. Борткомпьютер ракеты вводит поправки на центробежную силу вращения ракеты вокруг центра масс Земли, на высоту полета и все ускорения ракеты, на положение векторов сил гравитации Луны и Солнца по траектории полета ракеты, на изменение массы топлива в ракете. Искусственно создать помехи гравидатчику невозможно в отличие от других систем навигации.
В 2000-х в Евросоюзе создан гравидатчик спутника на основе двух взаимно перпендикулярно соединенных одним концом интерферометров Майкельсона с немагнитными тяжелыми зеркалами на всех трех концах датчика. Датчик в спутнике гравитационного картографирования дал точность примерно в 1000 раз выше датчика гантельного типа: спутник определял изменение силы гравитации на уровне одной десятитриллионной.
На новый тип датчика перешли ядерные баллистические ракеты России, Франции, США. Новый гравидатчик дает точность определения координат (зависит от разрешения спутниковой гравитационной карты Земли) примерно 90м, но из-за вибрации не работает на конечном атмосферном участке траектории полета. На конечном участке работают спутниковая, инерциальная системы навигации.
Конструктивный аналог нового датчика – датчик гравитационных волн LIGO из двух взаимно перпендикулярно соединенных одним концом интерферометров Майкельсона, дающих выходной сигнал по принципу накопления сдвига фаз между импульсами света обоих 4-километровых плеч датчика LIGO. Датчик LIGO впервые в истории детектировал гравитационные волны.
Для увеличения чувствительности в каждом из двух плеч датчика LIGO ячейка Фарадея (модулятор света) пропускает через полупрозрачное зеркало-1 монохроматический импульс света к парному зеркалу-2 на расстоянии 4км. Затем ячейка Фарадея делает зеркало-1 непрозрачным, пока импульс света не переотразится между зеркалами 4000 раз. Затем ячейка Фарадея делает зеркало-1 снова прозрачным, чтобы импульс света попал на фотодетектор.
За 4000 отражений импульса света от зеркал-1-2 чувствительность датчика вырастает в 2000 раз – эквивалентно увеличению длины плеча датчика LIGO с 4км до 8000км. Аналогично устроено второе 4-километровое плечо датчика LIGO. Множество подобных решений на высоком инженерном уровне позволяют датчику LIGO фиксировать изменение расстояния между зеркалами на 0,001 диаметра протона.
Имея такую точность подлодки, надводные военные корабли гравидатчиком по повороту проекции вектора силы гравитации в горизонтальной плоскости, находили бы крупные подлодки противника за многие километры.
НАВИГАЦИОННАЯ БАЗА:
1. навигационная база – несовпадающие 3 точки + информация с какой стороны от плоскости полусфера положительных чисел каждой координаты.
2. навигационная база – несовпадающие 2 точки и плоскость.
3. навигационная база – несовпадающие 1 точка и две непаралельные плоскости.
4. навигационная база – 3 непаралельные плоскости.
НАВИГАЦИОННАЯ КАРТА ВЕРОЯТНОСТИ – карта на которой цветом или другим способом указаны вероятность расположения объекта навигации.
ГЕОИД – материальная или цифровая модель поверхности планеты. Цифровую модель геоида использует компьютерный навигатор в спутниковой навигационной системе. Автоматическими станциями радиолокационным сканированием Венеры, Марса получены их геоиды. Гравитационные геоиды создают спутники гравитационного картографирования.
НЕИНЕРЦИАЛЬНАЯ СИСТЕМА КООРДИНАТ – система координат двигающаяся с линейным или угловым ускорением.
ИНЕРЦИАЛЬНАЯ СИСТЕМА КООРДИНАТ – система координат в которой линейное и угловое ускорения, центробежная сила в пределах допусков потребителя информации.
НУЛЕВАЯ ТОЧКА ОТСЧЕТА ПРОСТРАНСТВА – указанная или подразумеваемая в контексте точка с которой начинают координаты X, Y, Z. Если в контексте другая система координат, нулевую точку отсчета берут с неё. Система координат может быть инерциальной, неинерциальной.
ОРИЕНТАЦИЯ – угловое расположение объекта или линии направления в системе координат источника информации.
ЛИНИЯ НАПРАВЛЕНИЯ – прямая привязанная к системе координат источника информации.
СИСТЕМА – группа функциональных элементов с взаимной обратной связью.
УПРАВЛЕНИЕ – изменение выходного сигнала системы по алгоритмам входного сигнала и заданной базе данных.
РЕЖИМ РЕАЛЬНОГО ВРЕМЕНИ – диапазон времени задержки управления, обеспечивающий полнофункциональное управление объектом, процессом, ситуацией с обратной связью с первоисточником сигнала. Первоисточники сигнала: объект, процесс, ситуация. Для колебательных процессов диапазон ограничен сверху, снизу.
ПРОГРАММА – алгоритм или целевой список алгоритмов на компьютерном языке.
ИНТЕРНЕТ-ПОРТАЛ – многостраничный сайт или совокупность сайтов, собранных в одно целое главной страницей с гиперссылками по темам. Сайт в котором не меньше 4 разных тем с постоянными в полугодовом масштабе, пользователями + каталог + поисковик.
ВЕБ – информационная структура всемирной компьютерной сети.
НЕДОСТАБ – незаконченная статья интерактивных интернет-энциклопедий.
ОЩУЩАЕТ – процесс получения мозгом сигнала биодатчика.
ИСТИНА – информация по требованиям:
1. нет лжи
2. нет противоречий
3. нет чрезмерной избыточности
4. нет чрезмерной обобщенности
5. нет манипулирования пользователем
6. изложена в доступной пользователю форме. Пользователи: человек, животное, искусственный интеллект, машина, система…
Эти пункты не входят в истину религиозную, которая есть соответствие догмам.
НАУКА – система знаний об окружающей среде, построенная:
1. на принципе датчика (желательно технического, а не биологического) с требуемой в данной теме точностью, фиксирующего факты для подтверждения теории
2. на принципе оцифровки информации
3. на принципе математической модели
4. на повторяемости научных экспериментов для верификации
5. на доказательствах на основе фактов и логики, а не веры
6. на приоритете фактов против теорий
7. на принципе бритва Оккама
8. слова, понятия в науке могут иметь только однозначный смысл
9. научные понятия понимают в обобщенном смысле, если нет уточнений
10. на принципе познаваемости мира: материалистическая картина мира
11. на принципе свободной конкуренции научных теорий по признаку максимального правдоподобия для большинства ученых
12. статус «официальная научная теория» требует соглашения с статусом большинства ученых. В научных энциклопедиях, в школьном образования только официальные научные теории.
13. теория научна если есть возможность её опровержения экспериментом
В рамках исключения в науке есть информация принимаемая на веру без доказательств: аксиомы, постулаты… Аксиому признают научной при условии:
1. научная теория построенная на основе аксиомы – утверждения без доказательств – может быть отвергнута без доказательств, если аксиома не признана большинством ученых
2. аксиома ненаучна если её опровергает научно доказанный факт
Часть ученых в науке принимает усилия для замены аксиом научной логикой.
В науке есть мысленный эксперимент.
Оценка наукой научных теорий, экспериментов, фактов проводится по большинству голосов при общем голосовании специалистов данной темы. В науке невозможна идеология. Идеология как система создания принципов, в общем виде исторически сложившаяся в религиозных, силовых и террористических организациях, не признает изменения своих принципов общим голосованием.
Идеология служит не истине как наука, а целям узкой группы общества. Наука служит всему человечеству. Идеология стремится к засекречиванию работы своей организации, наука стремится к открытости своих организаций, к свободному доступу к научной информации. Исключение: засекречены разделы фармацевтики, ядерной физики, гидроаэродинамики.
НАУЧНЫЙ ЭКСПЕРИМЕНТ – эксперимент соответствующий требованиям:
1. информация получена с датчиков требуемой в данной теме точностью. Технические датчики предпочтительнее биодатчиков (глаза, уши…) человека.
2. выполняется условие повторяемости эксперимента.
УЧЕНЫЙ:
Ученый – представитель профессии, цель которой познание естественных объектов, явлений, естественных процессов.
Ученый – нетехнический математик или первый познаватель общественно полезной информации, известной Природе, неизвестной Человеку.
Ученый – создатель познавательной модели естественного объекта или явления. Часто путают ученого с инженером. Разница между ученым и инженером – разница между наукой и техникой, разница между естественным (от природы) и искусственным (от человека). Ученый познает естественное (существующее независимо от человека) через модели природных явлений, инженер создает искусственное (технику). Ученый – это следователь, через модели явлений расследующий, познающий природные явления. Ученый создает только модели природных явлений в природных и технических объектах. Технику создают инженеры, не ученые. Атомные, термоядерные бомбы созданы инженерами, а не учеными. Часть инженеров, создававших атомные, термоядерные бомбы, были учеными работавшими инженерами. Создание модели природного явления – не конечная цель ученого, средство ее достижения. Поэтому ученого нельзя назвать создателем в общем смысле. Создатель в общем, не в узкоспециализированном смысле – инженер. Ученый – Познаватель, инженер – Создатель. Разницу определяет цель профессии.
Изобретатель, геноинженер – разновидности инженера, а не ученого. Новые технологии создают инженеры, а не ученые.
ИНЖЕНЕР:
1. Инженер – представитель профессии, целью которой создание или поддержание работоспособности искусственного объекта, искусственной системы.
2. Инженер – создатель информации об структуре искусственного многофункционального материального средства достижения цели или технологии его изготовления, эксплуатации.
3. Инженер – создатель информации о структуре искусственно созданного товара.
4. Инженер – технический математик (инженер-математик).
5. Инженер – технический программист (инженер-программист).
6. Инженер – специалист по технике безопасности.
7. Инженер – специалист с высшим уровнем технического образования или самообразования.
Высшая форма инженера – изобретатель. Инженера путают с ученым. Разница между инженером и ученым – разница между техникой и наукой, разница между искусственным и естественным. Инженер создает искусственное, ученый познает естественное (существующее независимо от человека) через модели природных явлений. Создание модели природного явления – не конечная цель ученого, а лишь средство ее достижения. Поэтому ученого нельзя назвать создателем в общем смысле. Создатель в общем, не в узкоспециализированном смысле – инженер. Инженер – Создатель, ученый – Познаватель. Разницу определяет цель профессии. Технику создают инженеры, не ученые. Атомные, термоядерные бомбы созданы инженерами, не учеными. Часть инженеров, создававших атомные, термоядерные бомбы, были учеными работавшими инженерами. Новые технологии создают инженеры, не ученые. Геноинженер – разновидность инженера, не ученого.
ИЗОБРЕТАТЕЛЬ – высшая форма инженеров, инженер решающий инженерные проблемы на уровне мировой новизны.
СОЗДАТЕЛЬ – разумный субъект создавший, создающий искусственный материальный или информационный объект, несущий в себе ценность для общества.
КОНСТРУКТОР (профессия) – создатель информации об структуре многофункционального материального средства достижения цели.
ТЕХНОЛОГ – создатель способа изготовления многофункционального материального средства достижения цели.
ТЕХНИКА:
1. техника – искусственно созданная разумной формой жизни функциональная материальная структура.
2. техника – созданные разумной формой жизни материальные многофункциональные средства достижения цели. Техника – не генная многофункциональная материальная структура. Техника и гены – это 2 технологически противоположные многофункциональные материальные структуры. Техника как и гены может самокопироваться (производство промышленность) и передавать наследственную информацию (перезапись компьютерных программ, баз данных). Но не делает это на молекулярном уровне в отличие от генов. В смысле самозарождения гены технологически более многофункциональны. Это причина того, что многофункциональные материальные (не чисто виртуальные компьютерные) структуры могут самостоятельно возникнуть только генным путем. В отличие от генных многофункциональных материальных структур техника имеет меньше ограничений на использование в структуре разных материалов, физических, химических эффектов. Меньше ограничений на надежность, на использование в внутренней, внешней среде широких диапазонов температур, давлений, ускорений, уровней радиации, агрессивных веществ. Начиная с некоторого ненулевого момента эволюции техника становится технологически более многофункциональна чем генные структуры. С этого момента скорость эволюции техники превосходит скорость эволюции генных структур.
3. техника – неприродная функциональная материальная структура, созданная другой неприродной функциональной материальной структурой.
4. техника – функциональные материальные структуры, полученные неприродными способами самоструктурирования.
5. техника – неприродная неживая или живая (самостоятельные разумные роботы) функциональная материальная структура.
ГОЛОГРАММА – биения оптических волн (отраженной волны освещающей объект и волны опорного генератора) сохраненные как монохромный рисунок на поверхности пленки или другого носителя. Цветная голограмма состоит из трех (красная, синяя, зеленая) монохроматических голограмм. Оптические волны могут быть заменены радиоволнами, ультразвуком. Голограмму можно передать по цифровой линии связи.
ГОЛОГРАФИЯ – метод создания 3D-изображения записью биений (интерференции) отраженного от объекта объектного луча и опорного луча в виде монохромного рисунка – голограммы. Оба луча имеют одинаковую длину волны. Цветное 3D-изображение получают тремя парами лучей создающими через 3 монохромных фильтра 3 монохромных рисунка на пластинке (пленке). 3D-изображение воспроизводят освещением голограммы использованной при записи длиной волны. Для записи голограммы можно использовать радиоволны, ультразвук. Голограмму можно передать по цифровой линии связи.
Три стадии эволюции систем с обратной связью:
Система с обратной связью: объект (система) из: датчики + источник сигнала управления + привод + рабочие органы (исполнительные элементы). Система с обратной связью материальная: из вещества. Система с обратной связью информационная: компьютерная программа, у которой есть функциональные аналоги:
1. датчики: входные каналы информации.
2. источник сигнала управления: софт обрабатывающий информацию.
3. рабочие органы: выходные каналы с выходным сигналом.
Стадия-1 эволюции системы с обратной связью:
1. разные функциональные элементы объекта эволюции механически, химически или информационно неотделимы друг от друга. Эволюционные изменения тратятся в основном на достижение ресурса, равнопрочности, надежности объекта.
2. технология, конструкция объекта упрощаются.
3. эволюция идет к структуризации материальной части объекта.
4. эволюция идет к структуризации информационной структуры процесса обработки информации компьютером объекта.
5. эволюция идет к иерархизации, к централизации информационной структуры процесса обработки информации компьютером объекта.
6. объем обрабатываемой информации уменьшается.
7. количество датчиков, информационных каналов уменьшается.
8. эволюция идет к структуризации, к иерархизации, централизации информационной структуры датчиков.
9. эволюция идет к структуризации, к иерархизации, централизации информационной структуры системы обработки сигналов датчиков компьютером объекта.
10. эволюция идет к универсальности объекта, к упрощению сопряженных с ним структур.
Стадия-2 эволюции системы с обратной связью:
1. начинается, усиливается механическое, химическое, информационное отделение функциональных элементов друг от друга. Эволюционные изменения тратятся в основном на увеличение количества, качества функций объекта.
2. технология, конструкция объекта усложняются.
3. эволюция идет к структуризации материальной части объекта.
4. эволюция идет к структуризации информационной структуры процесса обработки информации компьютером объекта.
5. эволюция идет к иерархизации, к централизации информационной структуры процесса обработки информации компьютером объекта.
6. рост объема обрабатываемой информации.
7. рост количества датчиков, информационных каналов.
8. эволюция идет к структуризации, к иерархизации, централизации информационной структуры датчиков.
9. эволюция идет к структуризации, иерархизации, централизации информационной структуры системы обработки сигналов датчиков компьютером объекта.
10. эволюция идет к узкой специализации объекта, к усложнению сопряженных с ним структур.
Стадия-3 эволюции системы с обратной связью:
1. слияние в единое целое механических, химических, информационных функциональных элементов.
2. технология, конструкция объекта упрощаются.
3. эволюция идет к деструктуризации материальной части объекта.
4. эволюция идет к деструктуризации информационной структуры процесса обработки информации компьютером объекта.
5. эволюция идет к деиерархизации, к децентрализации информационной структуры процесса обработки информации компьютером объекта.
6. объем обрабатываемой информации уменьшается.
7. количество датчиков, информационных каналов уменьшается.
8. эволюция идет к деструктуризации, к деиерархизации, децентрализации информационной структуры датчиков.
9. эволюция идет к деструктуризации, к деиерархизации, децентрализации информационной структуры системы обработки сигналов датчиков компьютером объекта.
10. эволюция идет к универсальности объекта, к упрощению сопряженных с ним структур
2002г: бумажная версия сайта (текст, рисунки механизмов костюма телеприсутствия). Компьютерная версия 01.2003г. Английская версия этого сайта в Интернете с 2004г. Английскую версию сайта я регистрировал на доменах robotsoldier.nm.ru (в нем сайт был в 2004г), robotsoldier.net (в нем сайт был 19.04.2005 – 05.2007г), androiduniversity.com – в нем сайт с 05.2007г. Русская версия сайта – institutrobotov.ru – в Интернете с 14.10.2005г.
2007г посещаемость androiduniversity.com institutrobotov.ru 1200чел/месяц, после чего 02.2008г их на неделю вырезала с Интернета Россия. 1.03.2012г – Россия на неделю вырезала мои сайты с Интернета.
В большой картинке в начале сайта Россия закрасила черным (в бумажном чертеже тоже) шлицы в оси многодискового сцепления кулачкового привода тросов. До этого Россия украла диск с сканом 54Мб этой картинки.
Сделаю androiduniversity.com сайтом с службой профзнакомств робототехников обоего пола + техническая интерактивная энциклопедия – система профессионального самообразования инженеров. Техническая информация в анимации. Одновременный перевод на 10 языков. Тематические форумы, каталог роботских сайтов, фирм. Сайт представит мою Всемирную робот-организацию: чемпионаты мира по рукопашному бою андроидов с ИИ, андроидов управляемых с костюма телеприсутствия. Создам Институт роботов в который войдут:
1. институт Госкибернетики
2. институт изучения механизмов саморазрушения сложных систем (государства, машин, др. систем). Разработка механизмов диагностики, защиты сложных систем от саморазрушения.
3. институт ускоренных испытаний: создание библиотеки технологий ускоренных испытаний любых объектов. Создание дешевого, легкого, компактного оборудования и методов ускоренных испытаний объектов, технологий.
4. институт взаимно независимых логических экспертов (теория военного трибунала, система оценки профлогики действий военных, гражданских служащих, теория профессионального суда и бесконфликтной работы профколлективов).
Создам личную изобретательскую фирму GE2.0 Готовлю разработки для неё.
Бесшумный газотурбинный двигатель андроида Айзек.
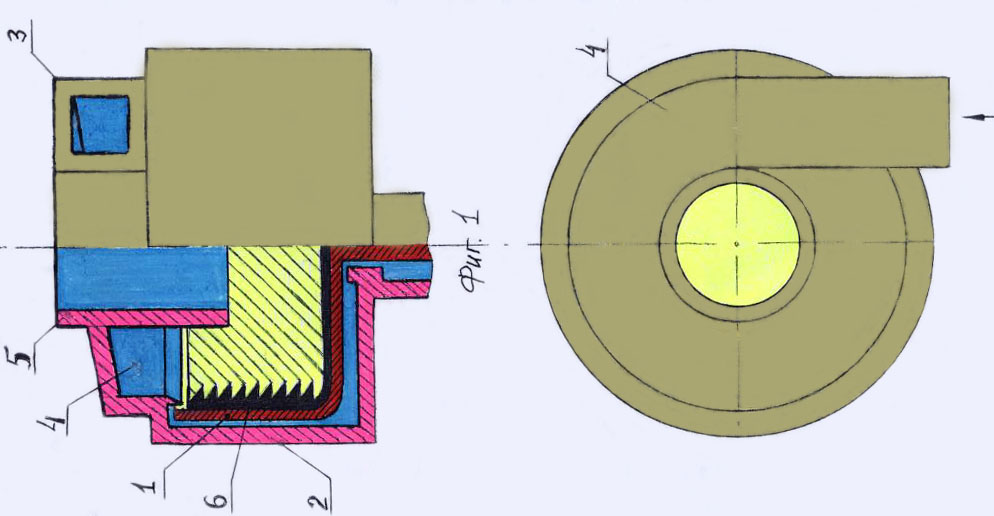
Андроиды, экзоскелеты, автомобили, самолеты будут работать от бесшумного (нет механизмов модуляции потока газа) многотопливного газотурбинного электрогенератора с стакан-турбиной изображенной выше.
Растягивающие усилия в лопатках (треугольные выступы условно названы лопатками) турбины заменены на сжимающие: используем для лопаток хрупкую высокотемпературную керамику с 3000°С на лопатке + дросселирование на входе + регулирование газового сопротивления турбины сопловым аппаратом для сохранения КПД и оборотов на частичных нагрузках + постоянные обороты турбины на любых нагрузках + другие мои изобретения обеспечат КПД газотурбинного двигателя до 50%.
Перепад температур с неохлаждаемой и охлаждаемой поверхностей турбины использует полупроводниковый термоэлектрический генератор электричества для отвода электронами части тепла в виде регенерированной электроэнергии. Её отводит с ротора турбины вращающийся трансформатор.
Трехступенчатый центробежный компрессор гонит воздух после ступени-3 вокруг внешней вращающейся цилиндрической части изобретенной мной высокотемпературной стакан-турбины, охлаждая ее. 3 ступени компрессора: давление на выходе 20-30атм. Больше давление воздуха – выше КПД, меньше расход воздуха, размеры воздушного фильтра.
Осевые компрессоры из-за помпажа (резонанс-скачков давления) не годны для турбин с постоянной частотой вращения с их резкими колебаниями расхода воздуха. Центробежный компрессор устойчив к помпажу при сверхглубоком дросселировании двигателя: большую часть ресурса двигатели автомобилей, наземной военной техники работают в режиме частичной нагрузки.
ГТД всегда работает на постоянной частоте вращения. Выходной крутящий момент меняется за счет глубокого одновременного дросселирования входа компрессора и соплового аппарата турбины. ГТД постоянной частоты вращения с центробежным компрессором набирает мощность 100 раз быстрее.
После 3 центробежных ступеней компрессора воздух идет в несколько параллельных круговых камер сгорания с 3-кратно дублированными форсунками + 3-кратно дублированная система поджига (запуск) двигателя. Лопатки ступени-3 компрессора закреплены непосредственно на торцевом диске-1 цилиндра турбины, утилизируя (функция теплообменника воздуха) за счет большой разности температур, тепло отработавших газов двигателя.
С другой стороны лопаток ступени-3 компрессора закреплен диск-2, к которому прикреплена труба-ось ротора большого диаметра, внутри которой все 3 ступени компрессора + турбина + камера сгорания. В концах этой оси закреплены внешние кольца роликоподшипников. Внутренние кольца роликоподшипников закреплены в съемных торцевых крышках неподвижного цилиндрического корпуса двигателя.
С съемной торцевой крышкой с стороны компрессора соединена неподвижная цилиндрическая ось неподвижных лопаток, тормозящих тангенциальную (круговую) скорость воздуха после ступеней-1-2 компрессора. Без торможения круговой скорости воздух не сжать в следующей центробежной ступени компрессора.
За последней центробежной ступенью компрессора тормозящего аппарата нет, чтобы не терять энергию кругового движения воздуха. Энергию кругового движения воздуха используют (смешивание топлива с воздухом) конические циклоны нескольких круговых камер сгорания. Каждая камера сгорания оптимизирована на определенные давление, температуру, влажность воздуха в воздухозаборнике. Это снижает вероятность заглохания, незапуска двигателя. Не запустится одна камера сгорания, запустится другая, через жаровые трубы запустит остальные.
При малом расходе воздуха часть конических циклонов отключат пружины клапанов или компьютерный привод с датчиками. При росте нагрузки двигателя для сохранения постоянного числа оборотов дросселированием уменьшается (управляемая заслонка) газовое сопротивление при входе газа в турбину и газовое сопротивление входа ступени-1 компрессора.
При холостом ходе двигателя те же обороты, но дросселированием расход воздуха через компрессор, расход газа через турбину доводятся до минимума. Ни при каких условиях обороты двигателя не меняются: все детали двигателя, его воздушный, газовый тракт, его подшипники, система шумоподавления акустически настроены на бесшумность только при стандартном числе оборотов.
Система управления двигателем обеспечивает теплоизоляцию горячих частей ГТД при холостом ходе мотора, чтобы камера сгорания и турбинная часть двигателя не остыли: часть времени холостого хода камера сгорания не работает, надо не дать двигателю остыть, чтобы не было проблемы повторного запуска.
Бесшумные роликоподшипники имеют простое число трубчатых (коаксиально-составных) упругих роликов: защита от резонанса. В бесшумном двухрезонансном роликоподшипнике внутрь смотанного однонаправленным углеволокном бесшумного ролика запрессован ролик из волокна с низкой скоростью звука в эпоксидной матрице. Звук глушит несовпадение фазы звука в ролике из-за разницы скоростей звука. Резонансные частоты двух трубок кратны простому числу для минимума шума. Постоянная упругая деформация роликов уберет радиальные зазоры, шум.
Большая инерция ротора сглаживает скачки момента выходного вала, температур, расходов в камере сгорания и турбине. Известны только 3 турбины без лопаток: турбина Герона Александрийского, дисковая турбина Николо Тесла и моя стакан-турбина. Стакан-турбина отличается от изображенной здесь отсутствием треугольных борозд на внутренней цилиндрической поверхности стакана. Патентом на изобретение защищена стакан-турбина.
Центробежная сила подводит к поверхности моей турбины только самые быстрые молекулы газа, выдавливая все медленные молекулы к оси турбины. Этого фильтра медленных молекул нет в турбине Теслы, поэтому у нее КПД ниже чем у моей турбины. Как изобретатель я профессионально порву Николу Тесла по любой теме. Стакан-турбину можно сделать многоступенчатой, вкладывая на спицах одни стакан-турбины внутрь других. 2003г: стакан-турбина успешно испытана на 15000об/мин и воздухе 5атм в заводе ЗИЛ в Москве.
В 2000г судовые газотурбинные двигатели обогнали по КПД судовые дизельные двигатели. Теперь поршневые двигатели обречены на вымирание. С их исчезновением вымрут топливная нефтеперерабатывающая промышленность, производство смазочного масла с присадками с их инфраструктурой, что усилит военную, экологическую безопасность государства, снизит расход нефти государствами.
Макивара покажет в табло силу удара
Измеряет силу удара независимо от направления, высоты удара. На рисунке: 2D-акселерометры-1-3-4; пористый упругий материал-2-6; жесткая труба-5. Принцип измерения: закон-2 Ньютона. Используются 3 2D-акселерометра, закрепленные на равных расстояниях и углах от центра масс жесткой овальной трубы-5 с упругим покрытием. Сила удара: F = 0,33 m m – масса жесткой трубы с упругим покрытием = массе туловища человека; а1, а2, а3 – ускорения трех акселерометров по горизонтальной оси Х; а4, а5, а6 – ускорения 3-х акселерометров по горизонтальной оси Z. Компьютер, в жесткой трубе, вычисляет силу удара по этой формуле и по инфракрасной линии передает на отдельно стоящий или подвешенный к потолку дисплей. По оси Х аналоговые сигналы смешиваются электрически и через АЦП идут в компьютер. Аналогично по оси Z. Результат по формуле. При 4 акселерометрах: F = 0, 25 m
m – масса жесткой трубы с упругим покрытием = массе туловища человека; а1, а2, а3 – ускорения трех акселерометров по горизонтальной оси Х; а4, а5, а6 – ускорения 3-х акселерометров по горизонтальной оси Z. Компьютер, в жесткой трубе, вычисляет силу удара по этой формуле и по инфракрасной линии передает на отдельно стоящий или подвешенный к потолку дисплей. По оси Х аналоговые сигналы смешиваются электрически и через АЦП идут в компьютер. Аналогично по оси Z. Результат по формуле. При 4 акселерометрах: F = 0, 25 m
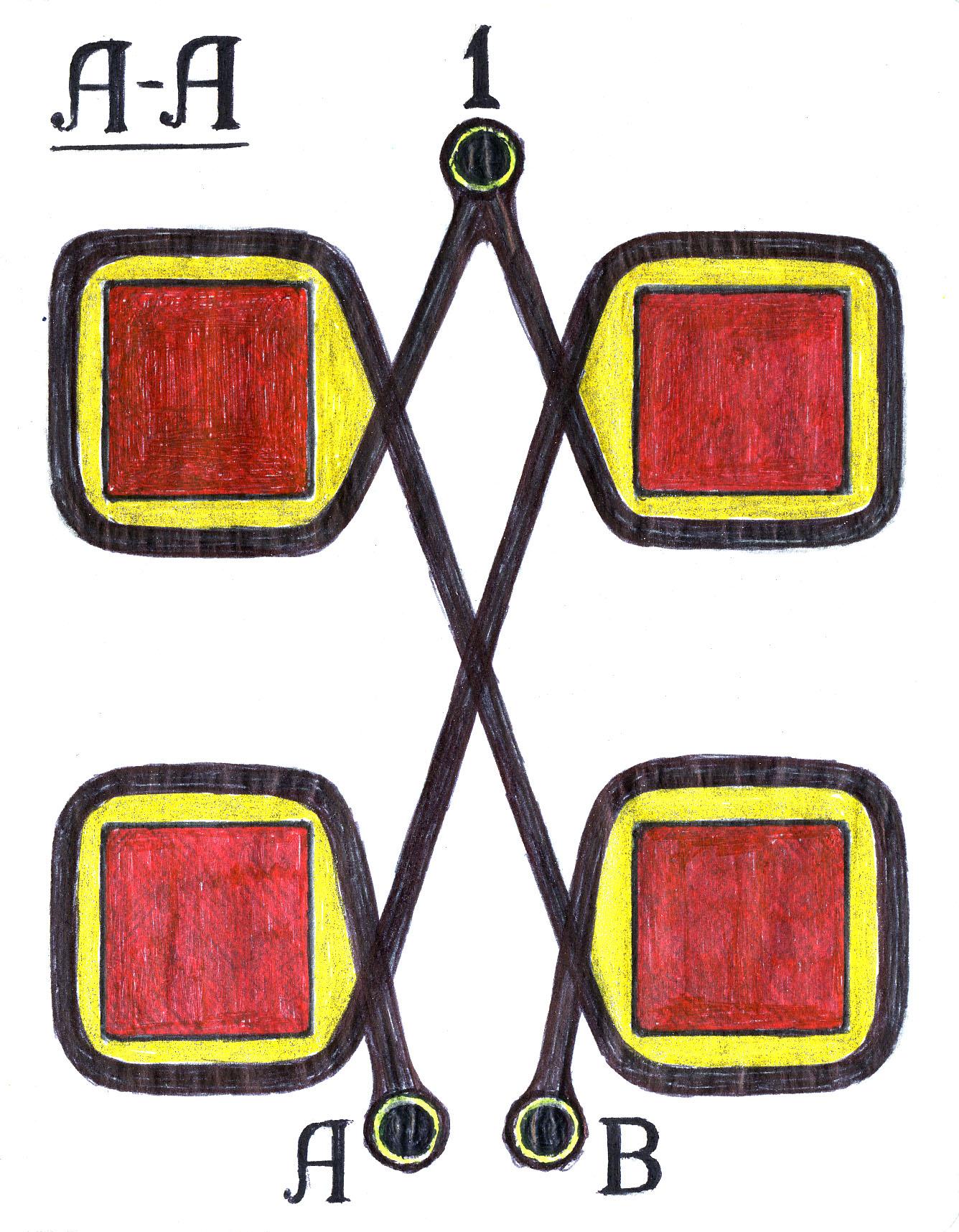
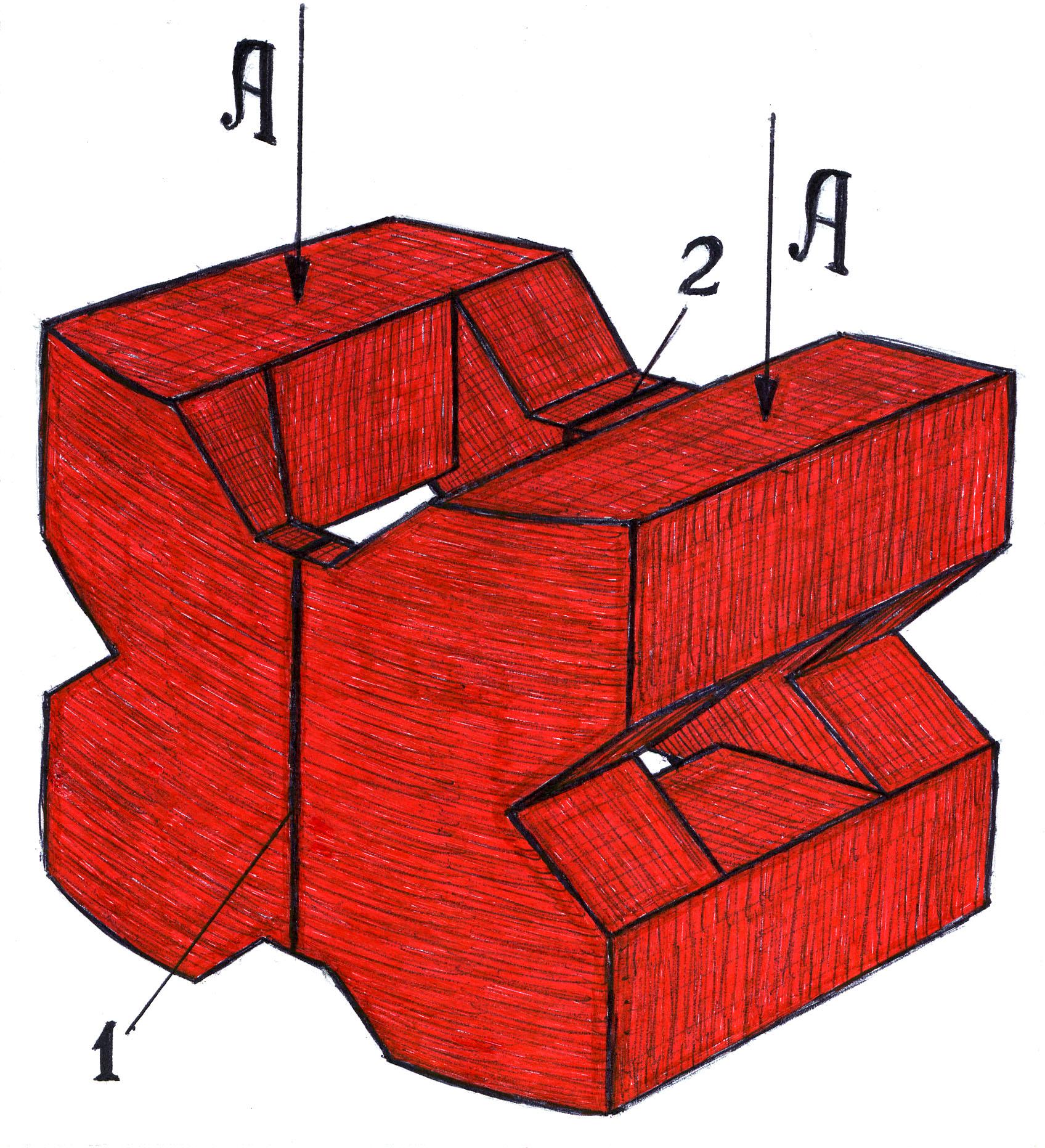
Магнитная 3D-головка с 3-канальной 3D-записью.
Магнитную 3D-головку записи-воспроизведения магнитофонов, магнитных дисков компьютеров придумал в 1980г. Емкость записи вдвое больше за счет записи вместо одного двух каналов с взаимно-перпендикулярными направлениями намагничивания, по 45 градусов в обе стороны от вектора движения 3D-головки по магнитной поверхности + укороченный канал-3. На чертеже А-А 1-магнитный 3D-зазор-1 записи, воспроизведения сигнала. Магнитный зазор-2 для размагничивания 3D-головки. Канал-1 в записи или воспроизведении образует обмотка, получаемой при использовании как входа при записи и выхода при воспроизведении сигнала контакта 1 и контакта А. Канал-2 подключен к контакту 1, к контакту В. Обоим каналам гальваническая развязка не нужна. Это упрощает конструкцию усилителей записи, воспроизведения. Для записи и воспроизведения канала-3 требуется гальваническая развязка: 2 диода с постоянным напряжением смещения (убирает ступеньку вольтамперной характеристики диода). Канал-3 получают при подключении к контакту-1 и к средней общей точке встречно направленных диодов гальванической развязки. Диоды противоположными концами соединены с контактами А и В соответственно. Усилители записи, воспроизведения канала-3 должны иметь гальваническую развязку с каналами-1-2. Канал-3 записывает ~100 раз меньше объем информации на пониженных частотах. Можно улучшить параметры канала-3 применив более сложную гальваническую развязку контакта А от контакта В. Есть другие незапатентованные способы многомерной записи, воспроизведения.
Шатун двигателя внутреннего сгорания.
Патент на изобретение №2170372: шатун: основной стержень с коленвал-подшипником-2 и поршневого пальца подшипником-1, крышка коленвал-подшипника-2 (снизу). Шатун снабжен стержнями-4-14, прокладкой между ними + 4 растяжки перекинутые через поршневого пальца подшипник-1, закрепленные на катушках-9 запрессованных на осях-8. Между каждой парой этих растяжек расположены прокладки-7-13. Крышки-10 коленвал-подшипника-2 установлены на пальцах-8 с запрессованными катушками. Крышки-10 установлены на пальцах-8 с запрессованными катушками-9. Крышки-10 скрепляют болт-11, гайка-12. Между стержнями-4-14 прокладка-5 из пеностекла. Между растяжками-3-6 прокладки-13-7 из пеностекла. Коленвал-подшипник-2, поршневого пальца подшипник-1, крышка коленвал-подшипника-2 (снизу) из композита с матрицей из магнийлитиевого сплава или алюминийлитиевого сплава с плазменным напылением поверхности трения. Стержни-4-14 из однонаправленного борволокна в эпоксидной матрице или однонаправленного углеволокна в эпоксидной матрице. Из титанового сплава: пальцы-8, катушки-9, крышки-10, болт-11, гайка-12 с наружними шлицами. Растяжки-3-6 из кевлара или углеволокна в эпоксидной матрице. Коленвал-подшипник-2, верхние части стержней-4-14, поршневого пальца подшипник-1, прокладки-5-7-13, растяжки-3-6 склеены мужду собой эпоксидным клеем. Изготовление, сборка: к прокладке-5 эпоксидной смолой приклеивают стержни-4-14. Сверху этой сборки приклеивают поршневого пальца подшипник-1, а снизу коленвал-подшипник-2. Прокладки-7-13 формируются на катушках-9, зафиксированных на оправке из 2-х технологических стержней (не показаны). Углеволокно пропитанное эпоксидной смолой по прокладкам-7-13 наматывают на одной катушке-9 по часовой стрелке, на другой катушке-9 против часовой стрелки. Далее обе катушки-9 снимают с технологических стержней, вставляют между отверстиями крышки-10 под пальцы-8. После чего в катушки-9 запрессовывают пальцы-8. Затем растяжки-3-6 закрепляют на поршневого пальца подшипнике-1 эпоксидным клеем. Снизу коленвал-подшипника-2 прикладывают без клея его нижнюю разъемную половинку, стягивают эту половинку крышками-10, болтом-11, гайкой-12 до отверждения смолы на растяжках-3-6 для создания предварительно напряженной конструкции. При технологическом стягивании крышками-10 болтом-11 в отверстие коленвал-подшипника-2 вставляют технологический стержень (не показан). После сжатия обеих частей крышки-10 болтом-11 в щель неотвержденных растяжек-3-6 вставляют прокладки-7-13, приклеиваемые к ним эпоксидной смолой. Щели вокруг прокладок-7-13 заполнит эпоксидная смола с коротковолоконным наполнителем.
Спутниковая навигационная система.

A – ближняя точка излучения радиоимпульса спутника.
B – дальняя точка излучения радиоимпульса спутника.
G, H – точки, в которых может находиться навигатор.  Представляют собой общие точки пересечения сфер равного расстояния от точек В, А с земной поверхностью, с навигатором.
Представляют собой общие точки пересечения сфер равного расстояния от точек В, А с земной поверхностью, с навигатором.
G – точка координат навигатора, исходя из его предыдущих координат.
K, G, P, H, E – часть окружности с радиусом R=|OK|, по которой пересекаются сферы равного расстояния от точек излучения В, А.
Плоскость вращения R=|OK| перпендикулярна земной поверхности.
C, N – проекции точек излучения радиоимпульса В, А на земную поверхность.
К, Е – точки, в которых может находиться самолет.
К – точка, в которой находится самолет, исходя из его предыдущих координат.
|KS|=|EF| – высота полета самолета.
F, S – это проекции K, E на земную поверхность.
S – земная координата самолета.
|СЕ| – проекция траектории спутника | ВО| на земную поверхность.
Координаты самолетного навигатора на земле: точка G – из уравнений слева вверху.
Координаты самолета: точка S из уравнений слева вверху.
BK, AK – расстояния прохода радиосигналом точного времени от навигационного спутника до летящего самолета.
Навигационный приемник: навигатор находит BK, AK по разнице времени «излучение – прием» радиосигнала точного времени.
В спутнике, навигационном приемнике самолета – синхронизированные высокоточные часы. В войне военные, часть гражданских спутников блокируют спутниковую навигацию ложными сигналами точного времени в указанных военными территории, времени.
Если в войне страна-1 блокирует ложными сигналами точного времени навигацию, страна-2 ответит повышением точности часов навигаторов, динамическим шифрованием сигнала точного времени.
Или на беспилотниках доставит радиосигнал точного времени в зону боевых действий для корректировки точности хода часов навигаторов. Вместе с динамически шифрованным сигналом точного времени беспилотник шифром передаст свои координаты.
Компьютер навигационного приемника расшифрует координаты беспилотника. Вычислит расстояние «беспилотник – навигатор», внесет в сигнал точного времени корректировку времени.
К моменту сбития авиационными противоспутниковыми ракетами спутников с ложным сигналом точного времени, часы навигаторов, участвующих в наступлении скорректируют. Спутники обеих сторон сбиты авиаракетами – их заменят беспилотники.
2 беспилотника с радиовысотомерами + рельеф местности в памяти навигаторов. Или вместо беспилотников: снаряд (ракета) с передатчиком точного времени + траектория снаряда (ракеты) в памяти навигатора. Односпутниковая система более живуча, чем обычная в равных условиях.
Навигатор по времени запаздывания сигнала точного времени найдет в таблицах решений 2 точки пересечения 2-х раздельных в времени радиолучей спутника с рельефом Земли (наземный навигатор) 2 координаты поверхности Земли. По аналогичным двум координатам в виртуальном высотном (от высоты самолета) огибающем рельефе полета + цифровой рельеф земной поверхности в памяти навигатора самолета + цифра радиовысотомера дают самолету его координаты.
Зеркальную координату-2 отсекает информация о направления оси поляризации радиоволны спутника. Для этого на спутнике 2 взаимно перпендикулярные линейно поляризованные антенны с углом 45° от вертикальной плоскости орбиты спутника.
Передача радиосигналов на одной частоте с разделением 2-х разных, стопроцентных по содержанию информации, каналов по оси поляризации есть в американском геостационарном телекоммуникационном спутнике «Комстар». В «Комстар» 2 антенны, одновременно работают на 1 частоте в 2-х каналах разных по вектору поляризации.
Перед каждой антенной «Комстар» установлен поляризующий экран в виде прямоугольного кольца с натянутыми на нем, с шагом ≤ 25% длины волны, параллельными позолоченными вольфрамовыми нитями. В поляризующем экране одной антенны нити ориентированы продольно, а в экране другой поперечно.
В моем спутнике две антенны с поляризацией излучения радиосигнала под углом 45° по разные стороны от плоскости орбиты. Левая по ориентации от плоскости орбиты спутника по ходу его движения антенна спутника излучает левый, по ориентации оси поляризации, радиосигнал.
Правая по ориентации от плоскости орбиты спутника по ходу его движения антенна спутника излучает правый радиосигнал.
В левом радиосигнале спутника больше число колебаний в цуге радиоволн импульса точного времени, чем в правом радиосигнале спутника.
В навигаторе мобильного телефона 2 радиосигнала 2-х антенн спутника принимают 2 антенны навигатора, 2 канала приемника. Антенны навигатора под углом 45° к плоскости орбиты.
Левая, относительно плоскости орбиты спутника по ходу его движения, антенна навигатора ловит сигнал левой антенны спутника, а правая от правой антенны спутника.
Навигатор отсечет зеркальную координату по различию числа колебаний в цугах импульсов левой, правой радиоволн спутника.
Если левая антенна навигатора справа от вертикальной плоскости орбиты спутника по ходу его движения, тогда она из-за изменения ориентации поймает сигнал правой антенны спутника. А правая антенна навигатора поймает сигнал левой антенны спутника.
На этот случай расположение (слева, справа) антенн навигатора к вертикальной плоскости орбиты спутника от определителя доплеровского сдвига по знаку изменения частоты радиосигнала (больше, меньше) спутника. Доплер навигатора отсечет зеркальную координату.
Обе антенны навигатора параллельны плоскости орбиты спутника – на экране мобильного телефона с спутниковым навигатором сообщение: поверните телефон на угол 90° вправо (влево) для работы навигатора. Проблем ориентации антенны нет в навигаторах мобильного телефона, автомобиля, самолета с 3, 4 взаимно перпендикулярных антенн (3-4 канала).
Для левой, правой антенн навигатора вместо линейной поляризации лучше левую, правую круговые поляризации пар антенн навигатора, спутника: не нужна точная ориентация антенн навигатора.
Для разделения правого, левого каналов радиосигнала точного времени спутника нужны изобретенные мной компактные поляризованные антенны, или 2 поляризующих экрана 2-х антенн как в «Комстар».
Вне конкуренции односпутниковая навигация при военной навигации через дальнобойные снаряды с передатчиком сигнала точного времени. Траектория снарядов, шифр сигнала точного времени в памяти навигатора. Радиосигнал точного времени можно заменить инфракрасным или оптическим модулированным сигналом.
Признателен Владимиру Атаманову за освещение недостатков статьи. Плохая весть стоит тысячи хороших.
Форум: vk.com/robot_navigation
 1) ДОМАШНИЙ КОСТЮМ ТЕЛЕПРИСУТСТВИЯ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ «КАШМИР»
1) ДОМАШНИЙ КОСТЮМ ТЕЛЕПРИСУТСТВИЯ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ «КАШМИР»
 2017г: христиане в FIA ввели правило: одинаковому перемещению рычага сцепления на руле соответствует одинаковое перемещение дисков сцепления независимо от положения – далеко или у самой точки схватывания: износ дисков вырос – классовая борьба силовиков против инженеров.
2017г: христиане в FIA ввели правило: одинаковому перемещению рычага сцепления на руле соответствует одинаковое перемещение дисков сцепления независимо от положения – далеко или у самой точки схватывания: износ дисков вырос – классовая борьба силовиков против инженеров.